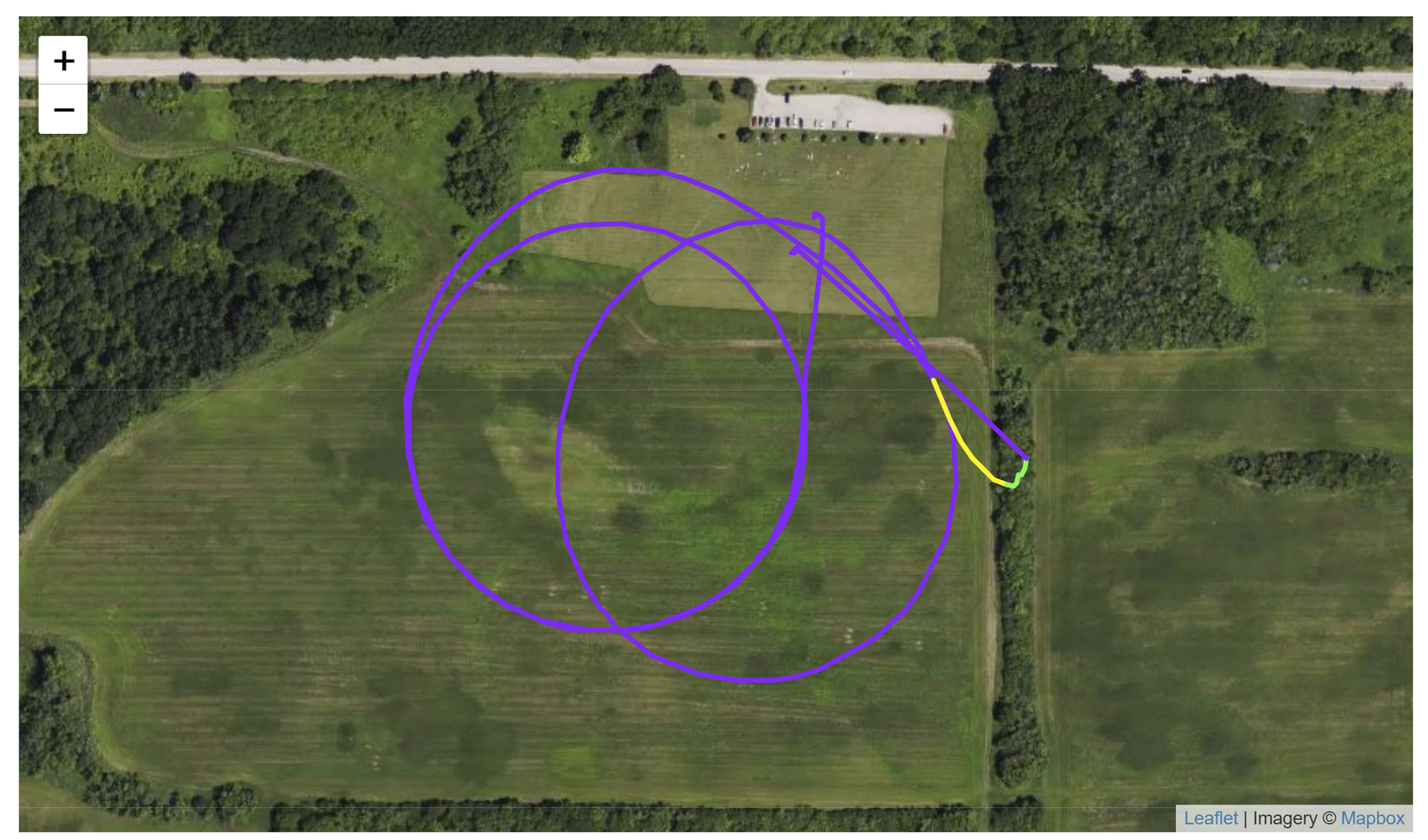
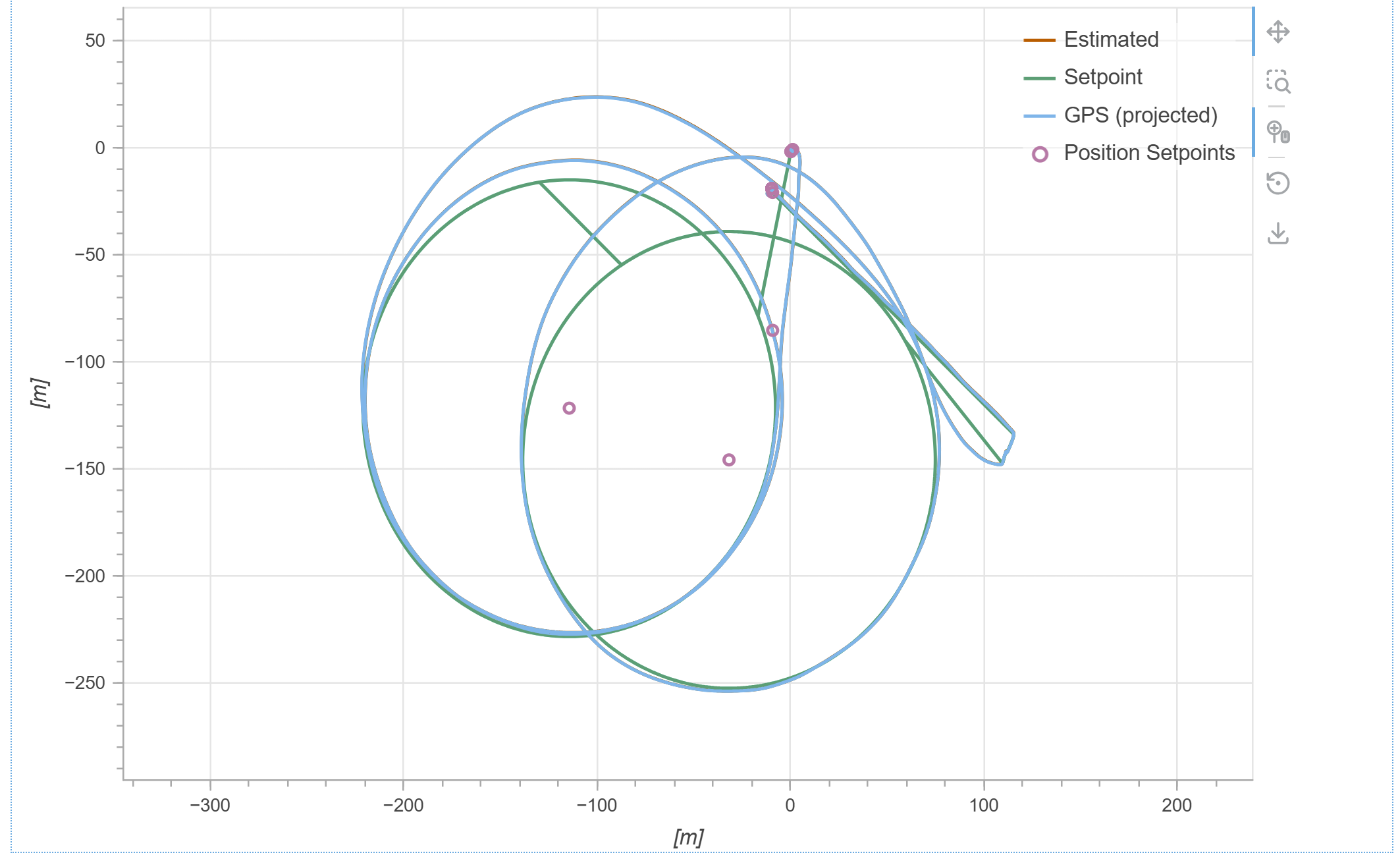
Instead of going to the landing point, our VTOL seemingly continued to loiter in final approach. My understanding, according to mission_block.cpp, is that it should have gone to the landing point since it had seemingly achieved the loiter altitude, loiter position, and heading towards the landing point.
Is there any other logic that I’m missing that would explain why it didn’t go to the landing point? Or did it not actually achieve the above criteria? Below are the log and mission plan for reference. I don’t suspect there was anything wrong with the mission since the SITL drone was able to complete it successfully. I’m on a slightly modified version of PX4 release/1.16.

{
“fileType”: “Plan”,
“geoFence”: {
“circles”: \[
\],
“polygons”: \[
\],
“version”: 2
},
“groundStation”: “QGroundControl”,
“mission”: {
“cruiseSpeed”: 15,
“firmwareType”: 12,
“globalPlanAltitudeMode”: 1,
“hoverSpeed”: 5,
“items”: \[
{
“AMSLAltAboveTerrain”: null,
“Altitude”: 114.30000305175781,
“AltitudeMode”: 1,
“autoContinue”: true,
“command”: 84,
“doJumpId”: 1,
“frame”: 3,
“params”: \[
0,
0,
0,
null,
42.0595877,
-88.1609435,
114.30000305175781
\],
“type”: “SimpleItem”
},
{
“AMSLAltAboveTerrain”: null,
“Altitude”: 114.30000305175781,
“AltitudeMode”: 1,
“autoContinue”: true,
“command”: 17,
“doJumpId”: 2,
“frame”: 3,
“params”: \[
0,
0,
106.68000030517578,
null,
42.0592608,
-88.16221759999999,
114.30000305175781
\],
“type”: “SimpleItem”
},
{
“autoContinue”: true,
“command”: 205,
“doJumpId”: 3,
“frame”: 2,
“params”: \[
0,
0,
0,
0,
0,
0,
0
\],
“type”: “SimpleItem”
},
{
“autoContinue”: true,
“command”: 205,
“doJumpId”: 4,
“frame”: 2,
“params”: \[
0,
0,
0,
0,
0,
0,
0
\],
“type”: “SimpleItem”
},
{
“altitudesAreRelative”: true,
“complexItemType”: “vtolLandingPattern”,
“landCoordinate”: \[
42.0602539,
-88.16129389999999,
0
\],
“landingApproachCoordinate”: \[
42.0590434,
-88.1612169,
53.34000015258789
\],
“landingTrigger”: 0,
“loiterClockwise”: true,
“loiterRadius”: 106.68000030517578,
“stopTakingPhotos”: true,
“stopVideoPhotos”: true,
“type”: “ComplexItem”,
“useLoiterToAlt”: true,
“version”: 1
}
\],
“plannedHomePosition”: \[
42.0549246,
-88.0488858,
226
\],
“vehicleType”: 20,
“version”: 2
},
“rallyPoints”: {
“points”: \[
\],
“version”: 2
},
“version”: 1
}