Last week, we were testing our VTOL (lift + cruise) around 12 kg and it crashed from 15-20 m altitude while transition.
The drone was equipped with Pixhawk 6C (1.15.4), T-motors’ prop, motors and ESCs and Holybro airspeed sensor with 12 battery.
The drone was tuned manually and with Autotune in Quadcopter airframe, later same PID and other parameters were added to the generic standard VTOL and it performed maneuvers as it was in Quadcopter airframe.
The stall speed of drone is around 16.5 m/s and thus the transition speed was set to 20 m/s. The wind was around 8-10 kmph (2-3 m/s). The airspeed sensor and other sensors were calibrated properly before flight test.
Once the transition switch was engaged, the puller motor started running at 100%, at one point around 7:51 in crash log file, the airspeed sensor detected ~ 23 m/s for fraction of time, and the drone switched from MC to FW mode and all hover motors were turned off. But in reality, from video footage, it was evident that, the drone never reached 23 m/s and it dropped like a stone from such altitude.
The question is,
Is there a way to counter such issue in future, like the airspeed should be more than transition speed for 3-4 seconds? Because such sensor error can lead to catastrophe.
Is there a way to switch from FW to MC mode, when descent rate is a lot.
We are also speculating that, Pilot panicked and did not use the transition switch to go back to MC mode, though we are not able to see it in log file. I thought it is possible to see the switch position in ‘Manual Control Input’ in log, but that is not mapped like all other switches. Is it possible to check whether transition switch was used or not while it was crashing?
I calibrated airspeed sensor in office and calm environment and it was should around 0.5-1.0 m/s in the office. The airspeed sensor was placed on landing skid, away from fuselage body and puller motor propeller downwash.
But i suspect, the reading were quite off.
Do you mean ‘Manual Control Input’ in log file graphs or something else for transition switch? because it is not visible under Manual Control Input graph.
Look for parameter RC_MAP_TRANS_SW (its value is 8 in your log)
Then view input_rc topic in the log, you’ll find values.07 (which is the 8th index, count starts at 00)
Seems like your pilot did try to transition back to copter.
RC_MAP_TRANS_SW is a PX4 configuration parameter. You can edit the vehicle’s configuration via QGC, for example.
Every PX4 carries a copy of the vehicle’s parameters, and you can see that at the bottom of the page at Flight Review, or when you open the log in PlotJuggler (the screenshot I added is from that application. It is recommended to use that if Flight Review isn’t sufficient).
If you’re wondering
To understand the definition of a parameter, Google “px4 params” and you’ll this list, make sure you’re looking at the correct PX4 version.
To understand ulog messages for PX4, take this for example and get yourself familiar with how to find these in the documentaion, Google or the source code.
Again, for VTOL transition I can’t really help. Hopefully You’ve got some tools to get started with log analyzing, although it’s quite overwhelming for someone unfamiliar with it.
If you can, you’re welcome to read the source code for VTOL transition and understand what went wrong and why the quadcopter motors didn’t start (or look it up in documentation).
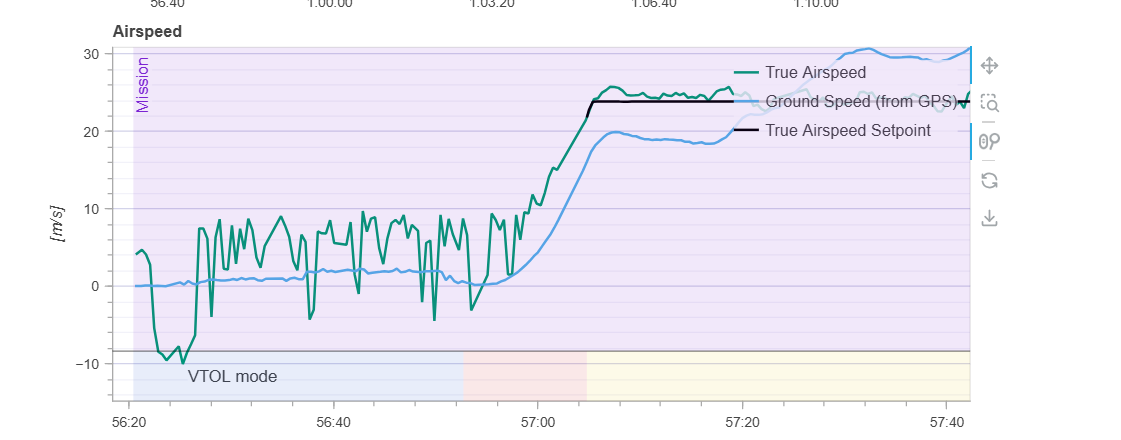
from the first glance the airspeed readings are all over the place. Maybe calibration is bad or the on of the ports of the airspeed was loose or leaking. Cause even the mounting error should have a reading like that.
Here is one of ours from the start of the flight and transition process. Using ms4525do sensor: