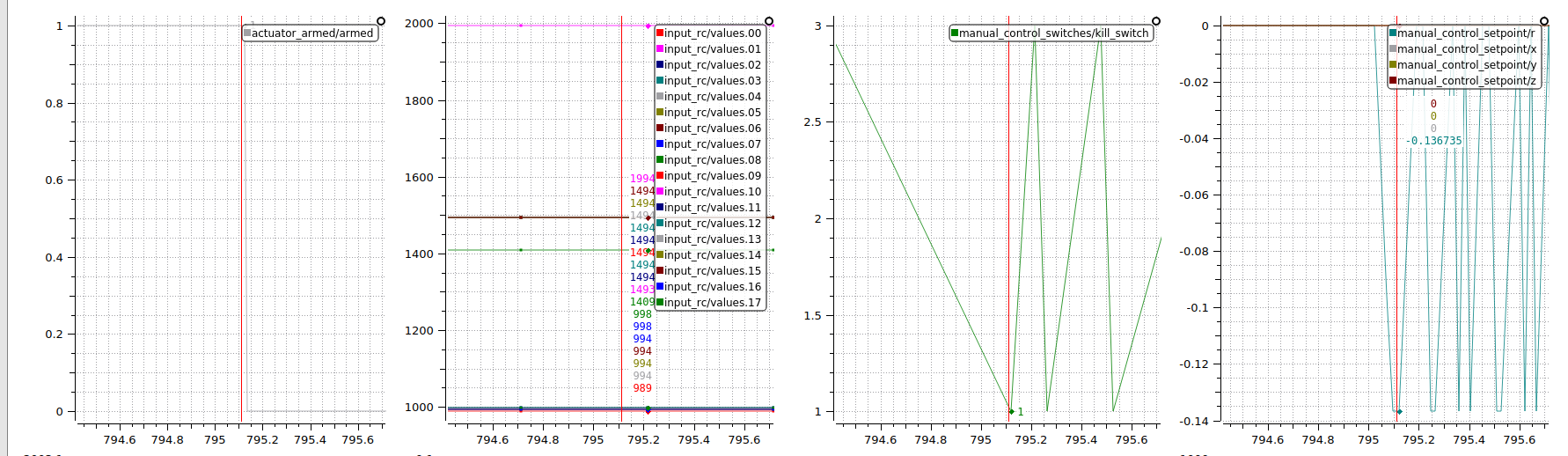
Weird indeed. Maybe we got incredibly unlucky with the high sampling rate of input_rc (it only logs with an interval of 0.5s, compared to manual_control_setpoints with 0.025s).
Also other manual control inputs get crazy, .r and .aux1.
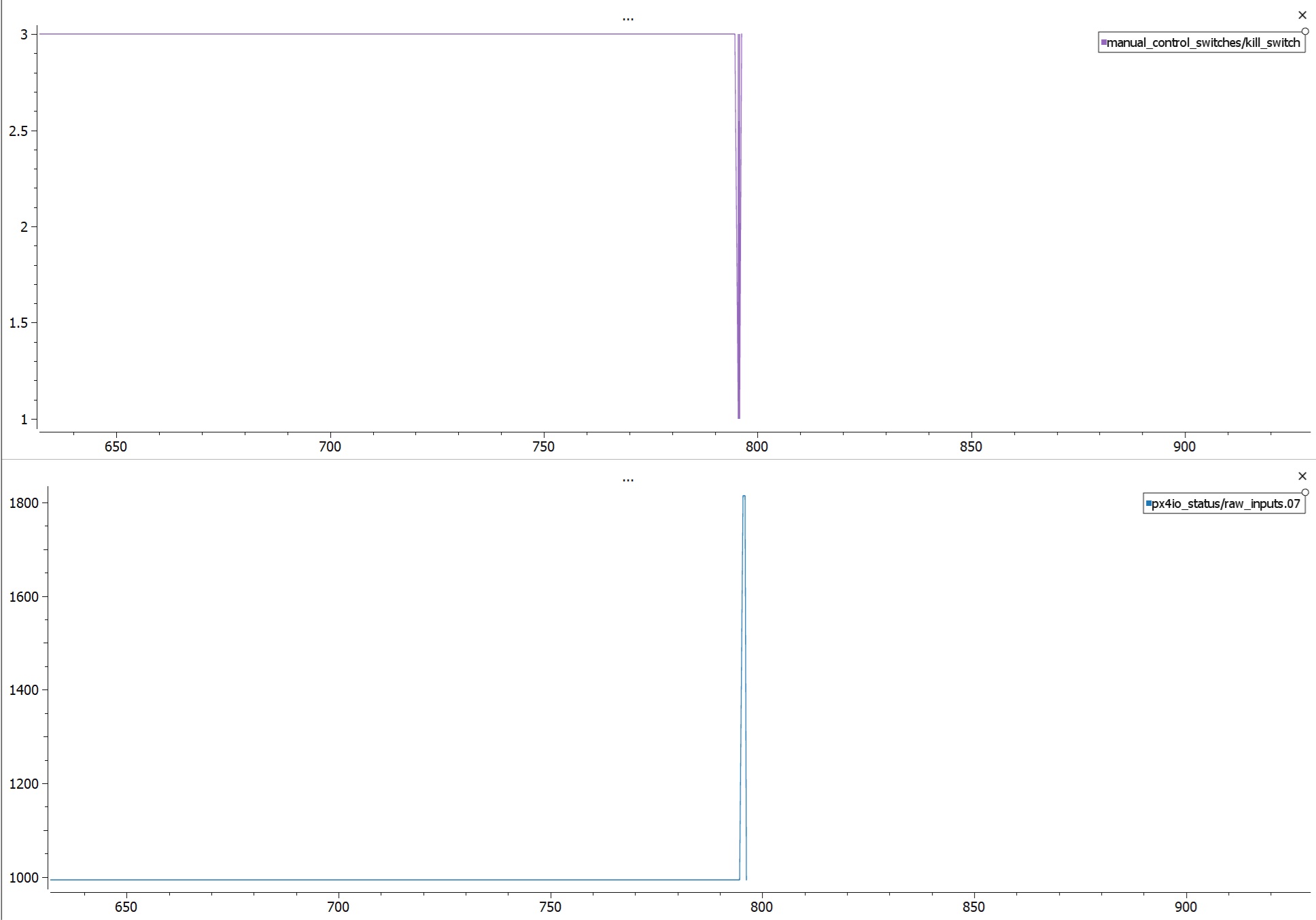
Actually, it is seen on px4io_status/raw_inputs.07.
That input should go to 2000us when a switch is flipped, but it only went to 1800us.
And from the start of flight, vehicle behaved kinda weird.
I tried changing the waypoint, and it took a few tries for it to accept my command from the QGC.
Since I don’t have the log from the transmitter, it’s kinda hard to tell where the fault was.
Yeah, you are right. Lockdown and kill are the same.
But anyway, i don’t have that enabled.
I have parachute in case of termination, but this unfortunately wasn’t that case, so it didn’t deploy.