I’m considering building a quadcopter with a rectangular frame structure, where each arm extends from the corners of a rectangle. I wanted to know if PX4 and QGroundControl natively support this kind of configuration or if they only support the standard square X-shaped configuration.
Is it sufficient to just select the X airframe and adjust the motor coordinates to match the rectangular shape? Or would it be necessary to create a new mixer specifically for this configuration?
Could someone please guide me through the steps to configure this shape?
Additionally, are there any advantages or disadvantages of a rectangular shape compared to the traditional X shape?
Thank you both for your responses. But I remain with a doubt, in the “Airframe” tab, which geometry should I select for the quadcopter then, apart from configuring motor positions in “Actuators” tab?
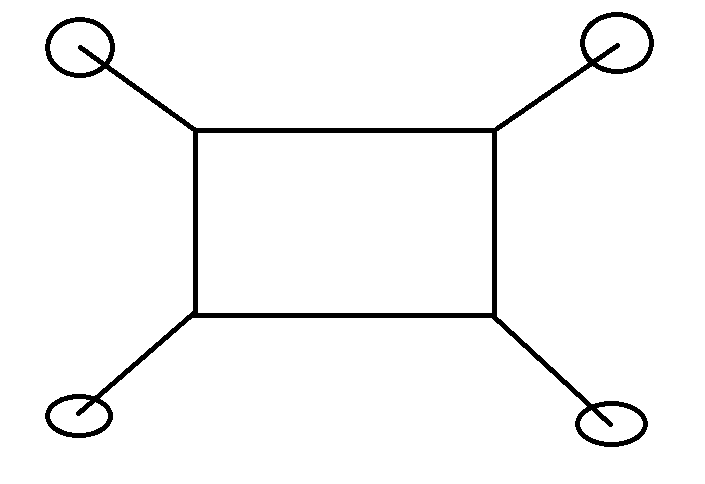
My drone would have this shape (all angles are equal).
The image you have attached in the last comment, to me it looks like this is an X frame. the square or rectangle is just a frame in the middle. I have a VTOL, with very weird shape, but for me the motors are in X configuration. Just mention the distance in the actuator tab and you are good to go.
Thank you for your response! I understand that the motors should be in an X configuration, but I’m still unclear about a few specific details:
At what angles should I place the arms relative to the frame? Should they be exactly 45 degrees from the centerline, or is there a different angle recommended for a rectangular frame like mine?
What should be the distances between the motors? Since my frame is rectangular, I’m unsure how to decide on the exact spacing between the motors, especially between the front and rear pairs versus the lateral pairs.
At what point along the arms should the motors be placed? In other words, how far out from the center of the frame (or along the length of each arm) should the motors be mounted?
Could you provide some guidance or a method to determine these angles, distances, and motor placement along the arms?
usually, the ideal angle is 45°, means x and y distances from the COG are same.
If it is little up and down, it doesn’t make a lot of difference. but going from 45 to 35°, it does make difference.
The motors are place at the end of the arm, and use little tilt. this will help you with the yaw control.