Hello!
I trying build a new type of frame tiltrotor VTOL.
Two motors rotate with one servo.
Tiltrotor VTOL E-flite is similar to my solution but has two independent servos and three motors.
In my prototype one servo and four motors.
I tried Generic QUAD aurframe in multirotor mode, takeoff and landing were successful.
What is the best sequence of flight modes for going to the fixed wing mode?
What airframe type of frame is better for prototype for tilt rolors and aileron control?
Where can find info about modifying the firmware for my frame type?
Big thanks!
Don’t know much about other questions but I can help with this
Where can find info about modifying the firmware for my frame type?
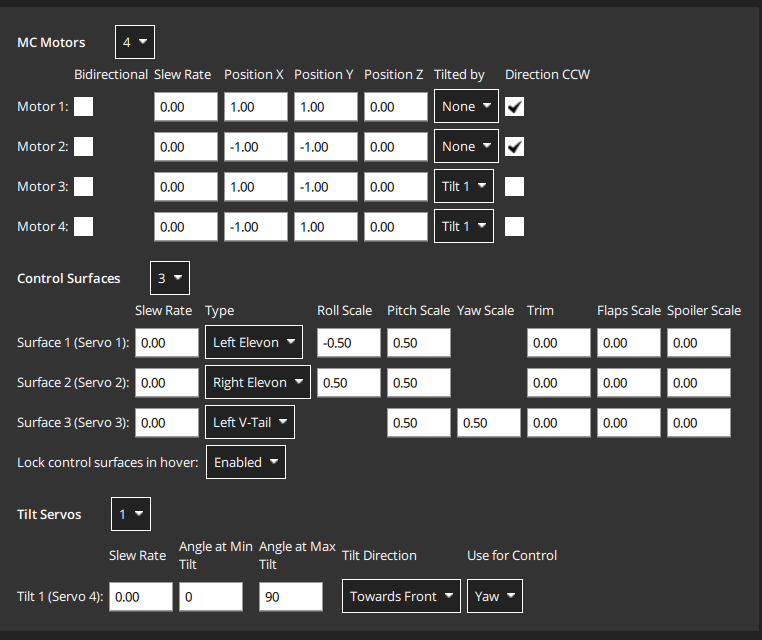
you should look for a new PX4 future called dynamic control allocation. If you are using PX4 1.14 it is enabled by default. If you are using 1.13 then you will need to enable it with the param SYS_CTRL_ALLOC
vehicle setup —> parameters —> search SYS_CTRL_ALLOC
This will give you freedom in configuring your vehicle. Learn more about this here:
https://docs.px4.io/main/en/config/actuators.html