Hello everyone,
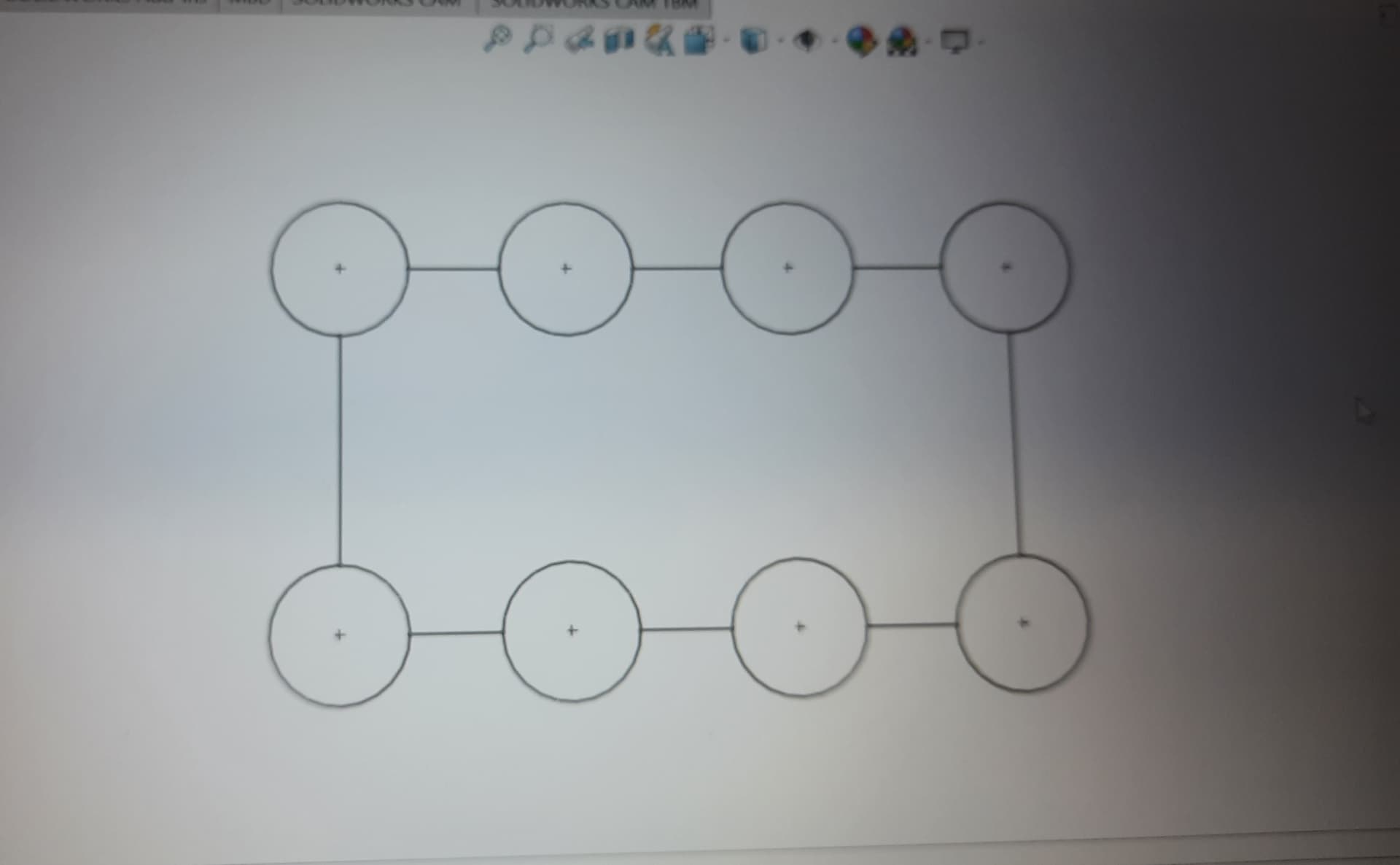
Me and my team working on college project. We are gone through different configuration like quad, hexa, octa and all but there is special requirement for rectangle drone as you can see in image.
Is it possible to make rectangle drone? How?
It would be really helpful if you give guidance on what needed to be modified and where to look in code and any video or materials would be also helpful.
Thank you for your help. And I really like your H-copter project. Our project requires little bit big drone so I don’t think there is option other than using Pixhawk flight controller.
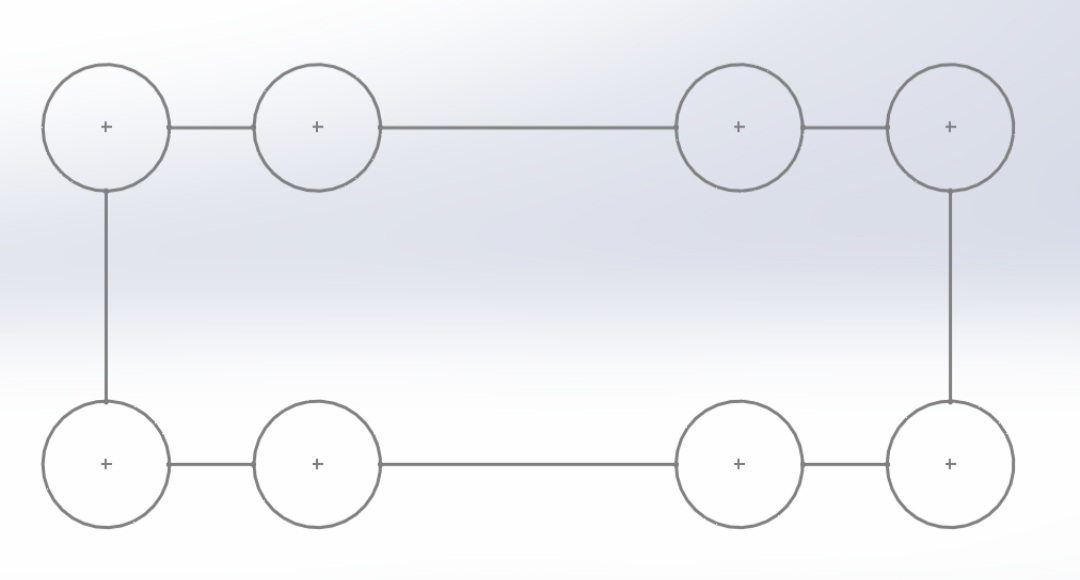
We slightly changed design as you can see in image because some more stuff requires to fit on it.
How to calculate roll and pitch factors for H-frame drone.
what are the changes required for below(because now distance between motors are different) frame according to you.
First go to the multirotor mixer geometries directory:
~/PX4-Autopilot/src/lib/mixer/MultirotorMixer/geometries
You can add a new toml file here, where all you have to do is type in the position of the motors (Ct, Cm parameters can also be changed. but I don’t think it is necessary since it can be rewarded with PID tuning).
The “px_generate_mixers.py” in the “tools” directory auto-generates the mixer files inside the build directory: ~/PX4-Autopilot/build/px4_fmu-v5_default/src/lib/mixer/MultirotorMixer
Before building, you also have to add new files in ~/PX4-Autopilot/ROMFS/px4fmu_common
The rest of the tips are in the first link I gave you before
Kangmin Lee
p.s. The H-drone I made was unstable in the pitch direction. This was solved by increasing the K-gain (=overall PID gain) of pitch-rate. Good luck