S500
Pixhawk 2.4.8, m8n gps
ESC 40A
8000maH LiIon
logs - Flight Review
Flight Review
Flight Review
Hi I have an unstable flight. The drone makes small deviations along the roll and pitch axis every few seconds, but still can balance itself quite well (drone can stabilise itself within 2 oscillations) even in strong wind.
I have tried advice from these thread and improved my roll angle diagram:
From this:
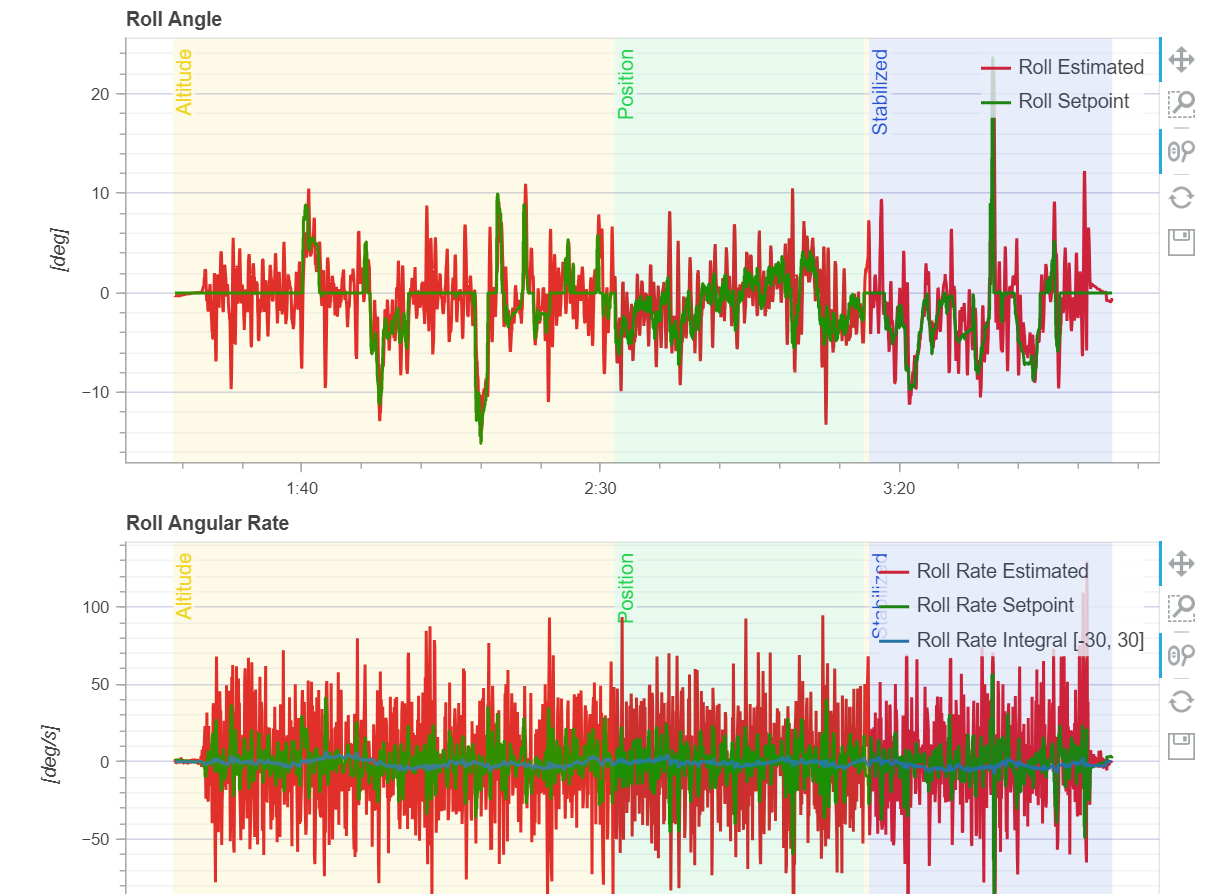
To this:

But random oscillations still occur.
I was trying to make auto-pid tuning but received “autotune failed” message in QGroundControll each time, without a description in logs or in the app at all.