Hi,
We’re currently flying a coax octocopter on PX4 v1.13.1 with the Pixhawk Cube Orange.
In the past we’ve had no notable or recurrent issues when using Auto-Takeoff, however we’ve noticed that, since updating from v1.12 to v1.13.1 (subjective observation), our drone has begun yawing when using Auto-Takeoff.
This does not happen when taking off manually in Position Control, and if you switch to Position Control whilst the random yawing is happening then it immediately stops. It also doesn’t happen in other similar modes such as Hold or Land, so it seems to be an issue relatively specific to the Takeoff routine.
It is unlikely to be magnetometer interference as we use Dual RTK to provide heading, and we have also moved our magnetometer far away from ESC wires. Additionally, if it was an issue with heading estimation then I’d assume it to happen in any similar flight mode such as Position, Hold or Land.
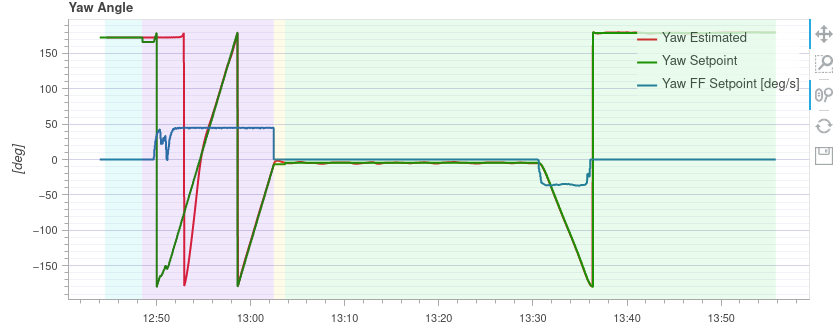
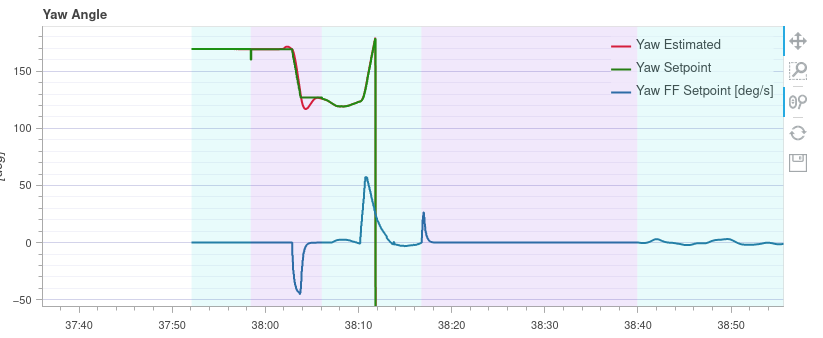
An example of a bad takeoff can be seen here
https://logs.px4.io/plot_app?log=edc0e618-7550-4ee2-88b0-7d41292935bf
Any help would be greatly appreciated, and please feel free to shoot as many questions at me as possible!