I would like to expose a problem that I’m having with two different hexacopters with the same firmware version:
1.5.5
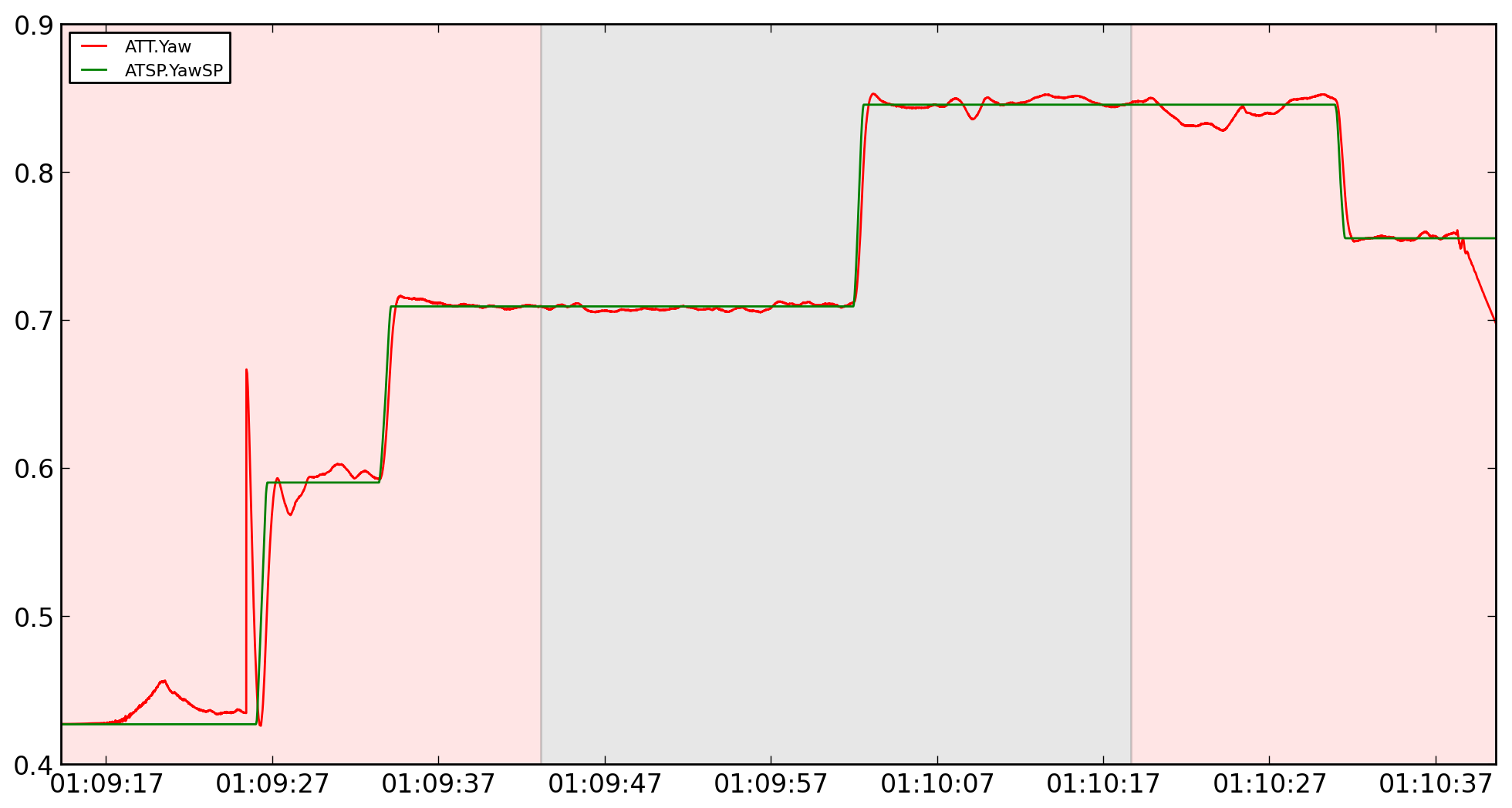
Everytime that I take off, in the first seconds (before 01:09:27 on the following plot) I have a fast yaw movement, as you can see in the following plot
It doesn’t seem to be some yaw drift caused by the motors because it only happens after it’s in the air.
As anyone experienced the same behavior?
I think that it’s not the same problem described on the following topic, because I’m not seeing any interference on the magnetic field caused by the increasing motor thrust.
Currently, I’m using an external compass in both multicopters.
It could be the same problem, but in the two different multicopters that I use, it only started to happen with the 1.5.5 firmware.
Beside that, I think that if it was because of the variation of the magnetic field caused by the motor thrust, it would happen more times during the flight.
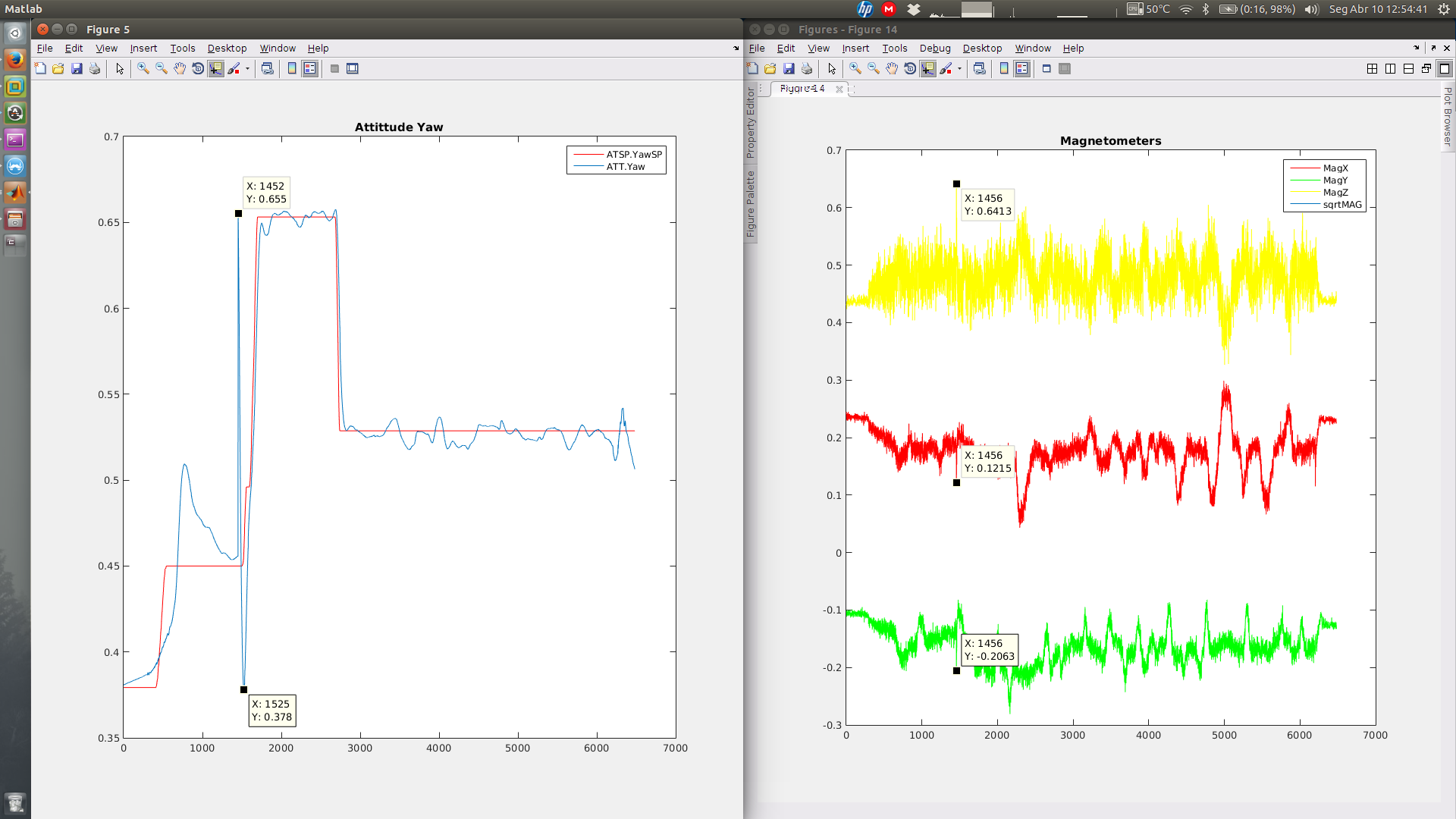
As you can see in the image, the magnetic field spike occurs after/almost at the same time the yaw movement happens, that’s why I think that the cause of the magnetic field spike is the yaw movement and not the opposite.
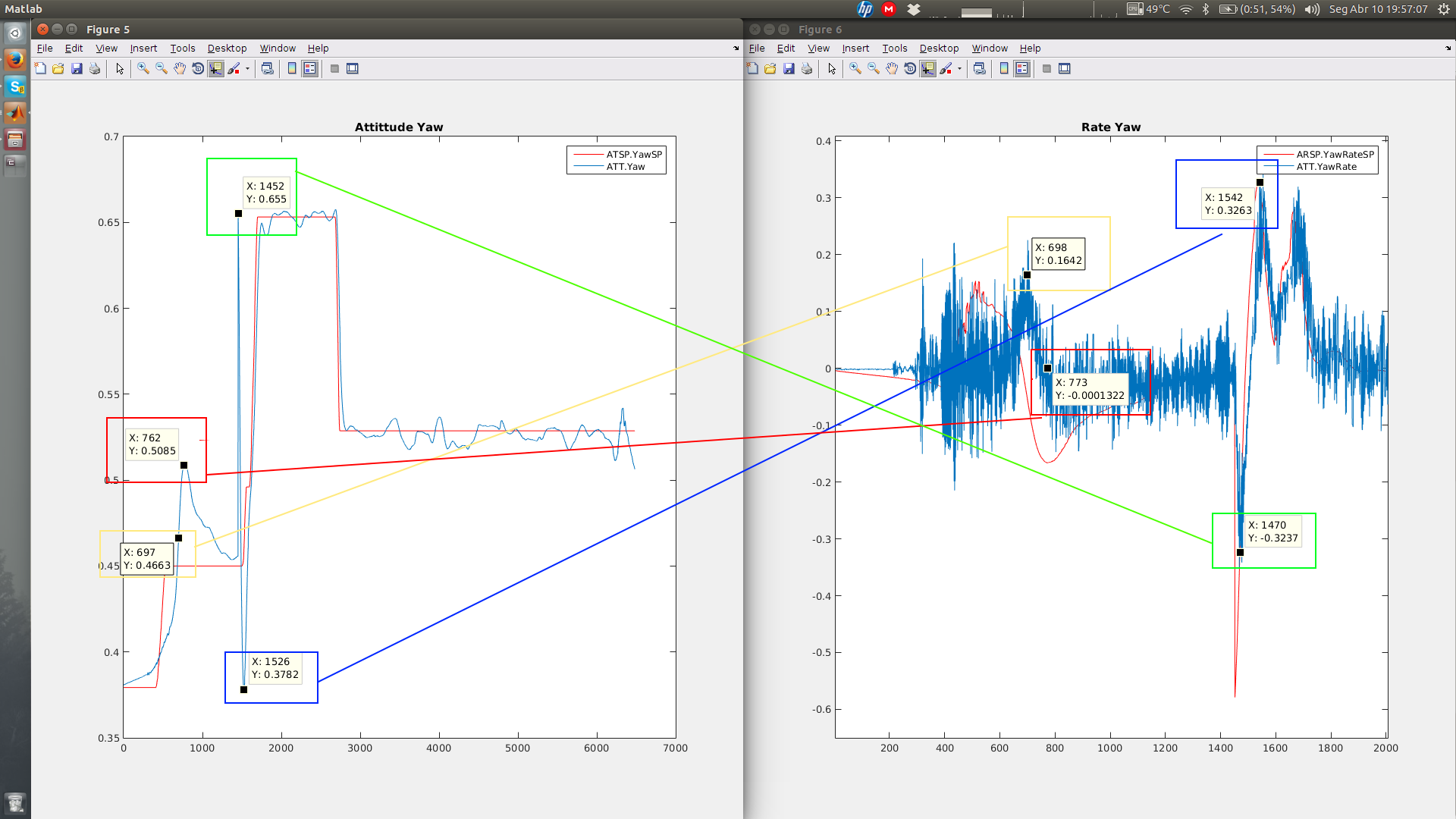
I think that every yaw movement/position on the left plot happened, as you can see in the angular speeds plot on the right.
As I said previously, to me the first movement (the red box) is consistent to the effect caused by the motor thrust, but the huge spike doesn’t seem. What do you think?
We discovered that we have to wait at least 2 mins at the exact location where it will be calibrated before calibrating it. All this to make sure MAG gets stabilized before calibrating it.
If it can help, it looks like if we let the UAV on the ground after arming it (safety switch) it “accumulates” something wrong with the yaw. You take off, and then, it does this huge yaw movement.
I also discovered, that we really have to let the UAV on the ground for at least 2 minutes before calibrating the MAG, it helps a lot.
please let me know if you have a new firmware you want to test.
The EKF2 default behaviour is to use simple magnetic heading fusion on the ground and switch to 3-axis fusion at 1.5m in air. This resets the yaw and field states and prevents large magnetic anomalies at ground level resulting in an incorrect heading and toilet bowling and potential loss of position control after takeoff when using GPS. The steel reinforcement in the concrete floor and/or building structure is causing a large change in magnetic field with height
Ardupilot deals with this in the controller with a leash on the yaw angle and additionally a controller set-point reset when the EKF publishes its yaw reset, but this functionality is not yet implemented in PX4.
Until it is I recommend you set EKF2_MAG_TYPE = 1. This will cause it to use the simple magnetic heading method for the entire flight.
Hi Paul. We are using Ardupilot’s 4.1.1 version and we see similar yaw resets around 20 degree ( in worst case) after takeoff due to magnetic interference.
In general what values of I-yaw are considered safe to fly just after takeoff. (we have seen 1-2 toilet bowling issues in 100 flights). Similarly what values of magnetic interference would be okay to fly, and what is the rationale behind the value?
(Compass is 0.25m away from the battery, and this configuration is in production, and any change will significantly impact transport boxes and stuff)