Hello there,
I am running into a peculiar behavior with a copter in SITL.
The setup looks like this:
Docker container rosmachine:
- Ubuntu 24
- Gazebo Harmonic
- Creates world and spawns drone (copy of x500 example drone)
Docker container PX4:
- Ubuntu 22
- Gazebo Harmonic
- Runs PX4 SITL
The containers are connected via host.
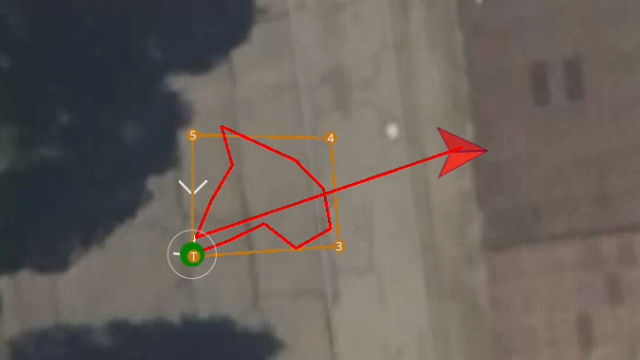
I start everything up, and it behaves as expected like the x500 example. However, when I try flying a simple pattern, planned with QGC, the copter cannot follow a basic trajectory. The estimated position is even jumping in QGC at random, sometimes up approx. 50m.
Even when hovering, the copter experiences extreme drifts, which is very unusual for a simulation without wind or any special environment factors.
I checked if it’s a timing issue, but when I inspect MAVLink, the time_boot_ms matches the iterations in Gazebo.
I assume either the GPS or the EKF might be the issue, but I have no clear idea of what it could be.

Startup looks good to me, except for the negative notify info, which is concerning.
When the copter lands the position is updated correctly again.
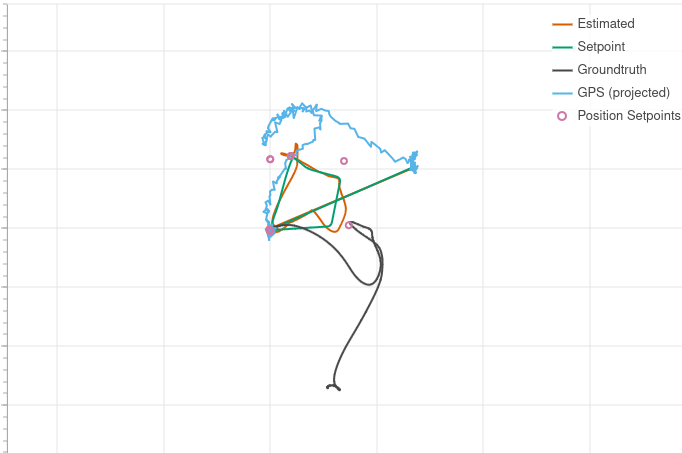
What I don’t understand is why is the Groundtruth so weird and what does it express?
another thing what brought me to the time issue thought was this:
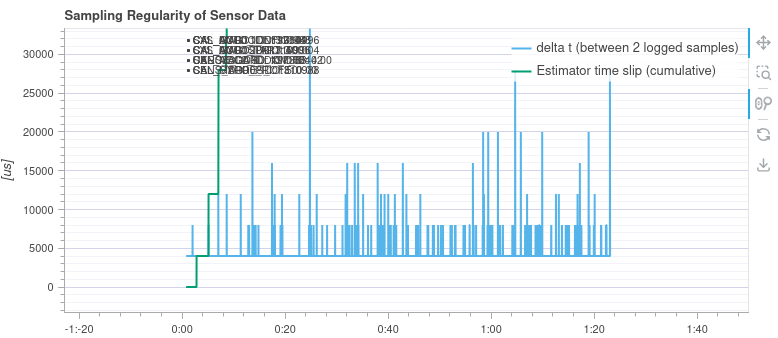
But since it looks the same if I run an x500 example and plan a similar pattern, I assume this isn’t an issue.
I start px4 with:
PX4_GZ_STANDALONE=1 PX4_SYS_AUTOSTART=4001 PX4_GZ_WORLD=flat_lands PX4_GZ_MODEL_NAME=drone ./build/px4_sitl_default/bin/px4
Does anyone have any tips on how to fix this or where to look for the mistake? I would appreciate any help or hints.
Let me know if any other data would be helpful
cheers