Hello!
I am getting started with a QAV250 drone kit with PX4. I am noob in this and I am stuck in one step in the configuration.
I correctly loaded the firmware and set the airframe type. But when it comes to callibrate the compass I am getting an error saying: “Retry callibration: unable to fit mag0”:
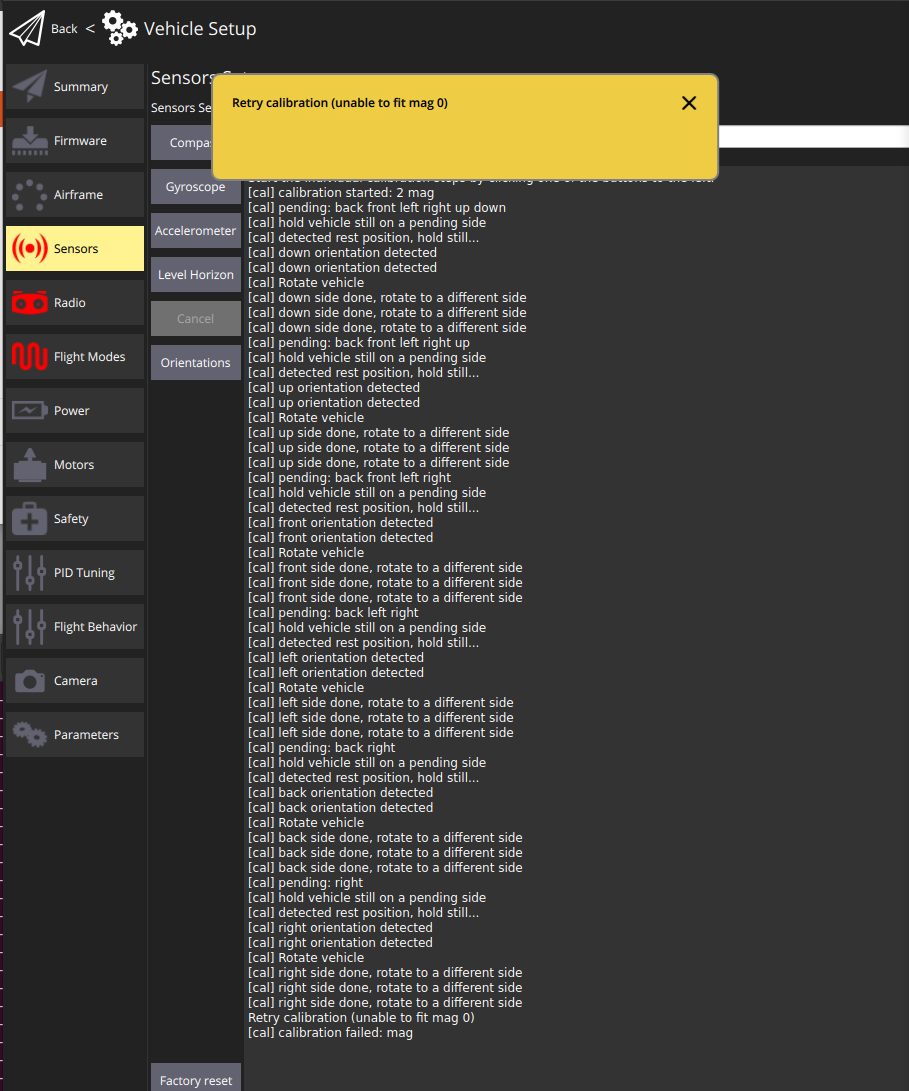
This error occurs right after I rotate the drone about all its 6 axes.
The parameters for MAG0 are:
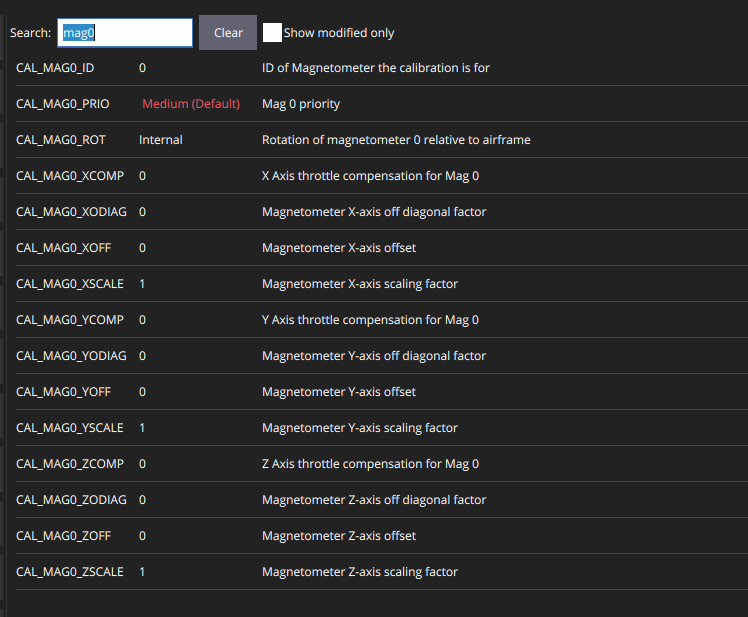
and the drone was assembled following the standard instructions from the manual, with the GPS module pointing to the front of the drone as well as the PX4 board arrow.
The firmware version is px4fmu-v5_default.
I think the MAG0 is an internal sensor of the PX4 board and the GPS module is not a GPS/compass module, it just says GPS. So I guess no external magnetometer is connected.
I’d appreciate your help
Thanks!
tliendro