Hey guys,
I need some help . Doing my first drone project with beaglebone blue and PX4. I have completed cross building PX4 with my beaglebone using the [master guide](https://docs.px4.io/v1.12/en/flight_controller/beag
[beaglebone_PX4_output.pdf|attachment]
lebone_blue.html). After completion of cross compiling the hardware, this is my output in beaglebone [attached as beaglebone_PX4_output.pdf
qGroundControl.pdf (183.4 KB)
[beaglebone_PX4_output.pdf|attachment]
beaglebone_PX4_output.pdf (17.5 KB)
] (without any external devices connected - motor, GPS).
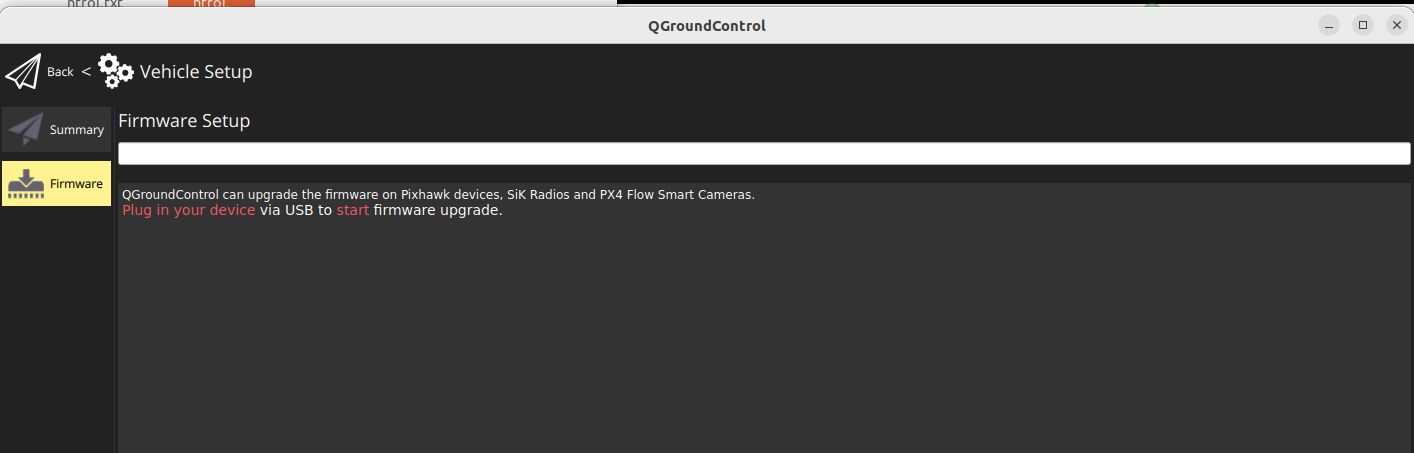
However, when I connect my device to qGroundControl (running on Ubuntu 22.04), the device is being unable to recognize. I followed the connection issues guide from QGroundControl and realized the device is being recognized on the OS level(log attached- QGroundControl.pdf), but am unable get past the below screen. Would appreciate any help.
Thanks in advance 
Hello, while I do not have much experience with beaglebone I do have experience in forcing connections. What is the path of the serial device you are trying to connect?
Hi Andrew,
Thanks for the reply, I am not sure how I missed this for so many days. I am trying to connect directly to beaglebone using micro-usb on a usb3.0 port.
When enabled LinkManagerVerboseLog, this is the output from the device:
[D] at ../../qgroundcontrol/qgroundcontrol/src/comm/LinkManager.cc:548 - "portName: "ttyACM0""
[D] at ../../qgroundcontrol/qgroundcontrol/src/comm/LinkManager.cc:549 - "systemLocation: "/dev/ttyACM0""
[D] at ../../qgroundcontrol/qgroundcontrol/src/comm/LinkManager.cc:550 - "description: "BeagleBoneBlack""
[D] at ../../qgroundcontrol/qgroundcontrol/src/comm/LinkManager.cc:551 - "manufacturer: "BeagleBoard.org""
[D] at ../../qgroundcontrol/qgroundcontrol/src/comm/LinkManager.cc:552 - "serialNumber: "1722EL002564""
[D] at ../../qgroundcontrol/qgroundcontrol/src/comm/LinkManager.cc:553 - "vendorIdentifier: 7531"
[D] at ../../qgroundcontrol/qgroundcontrol/src/comm/LinkManager.cc:554 - "productIdentifier: 260"```
How can I force the connection ?