I had some experience on StackOverflow where responses will be in hours and Here I am not sure how big the community is and how active the people are. Hence Asked
I am not sure how soon people in the community will respond for the posts describing the issues. Can someone respond to my post?
By the way I know No one is paid here
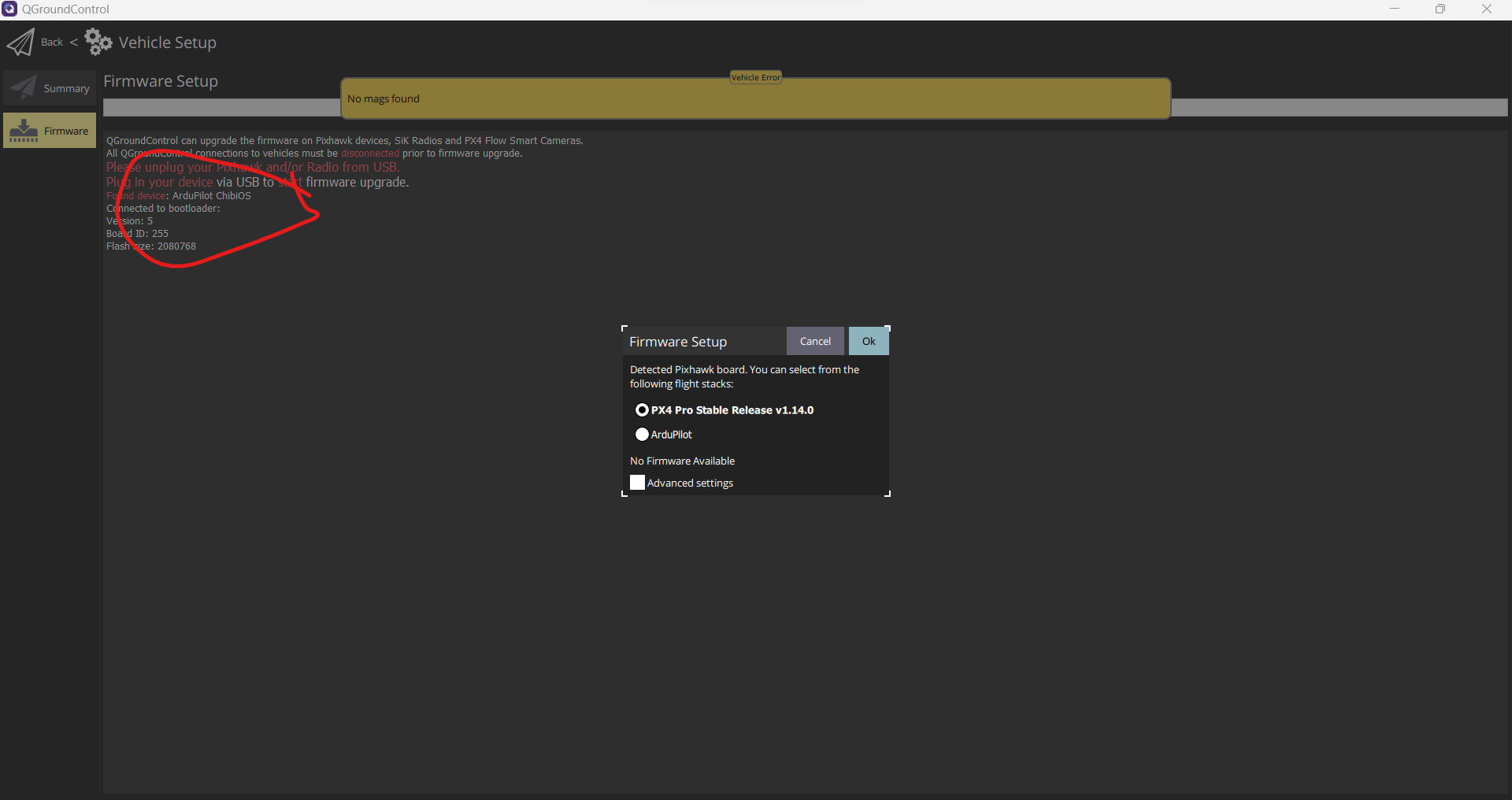
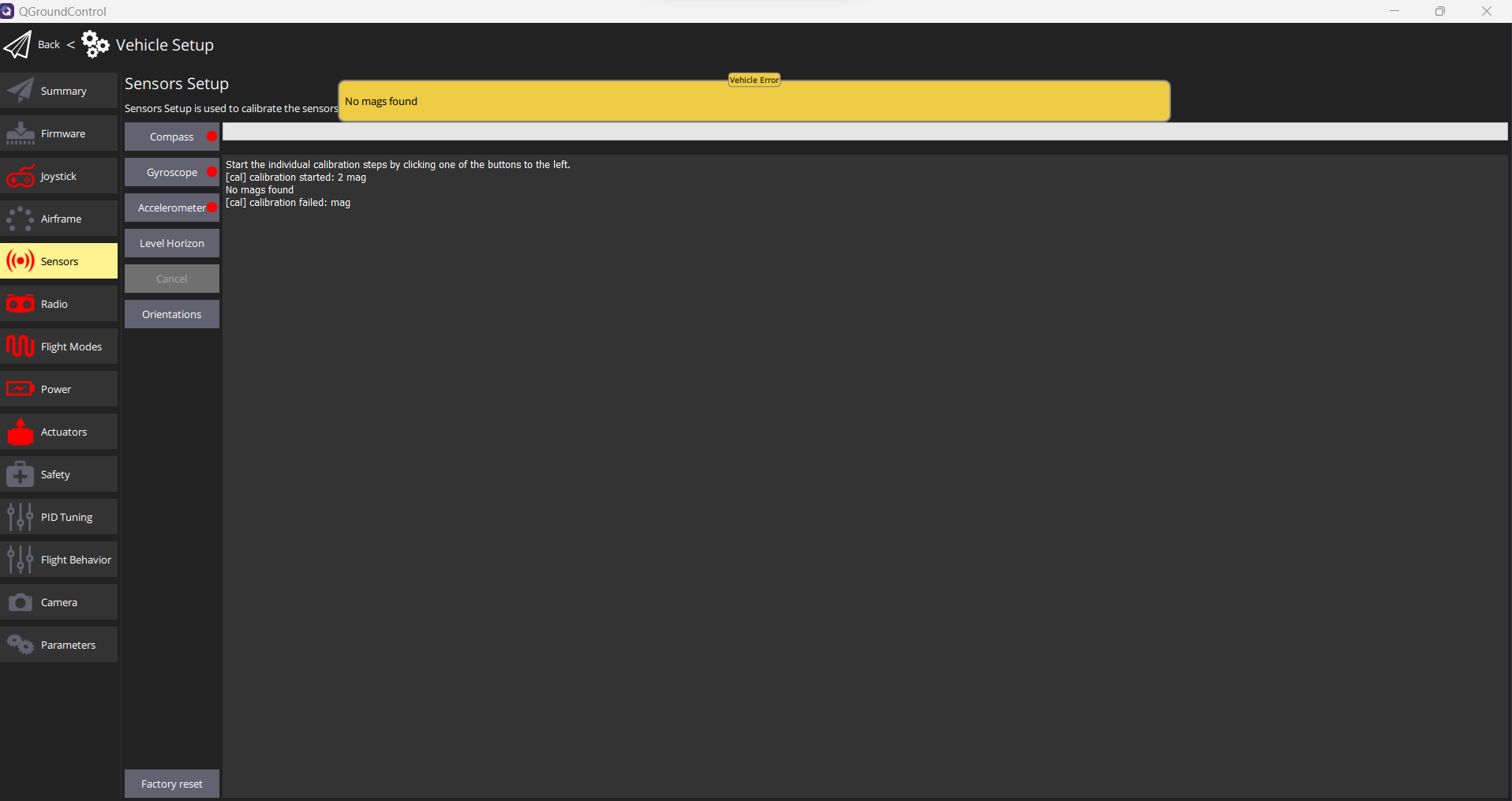
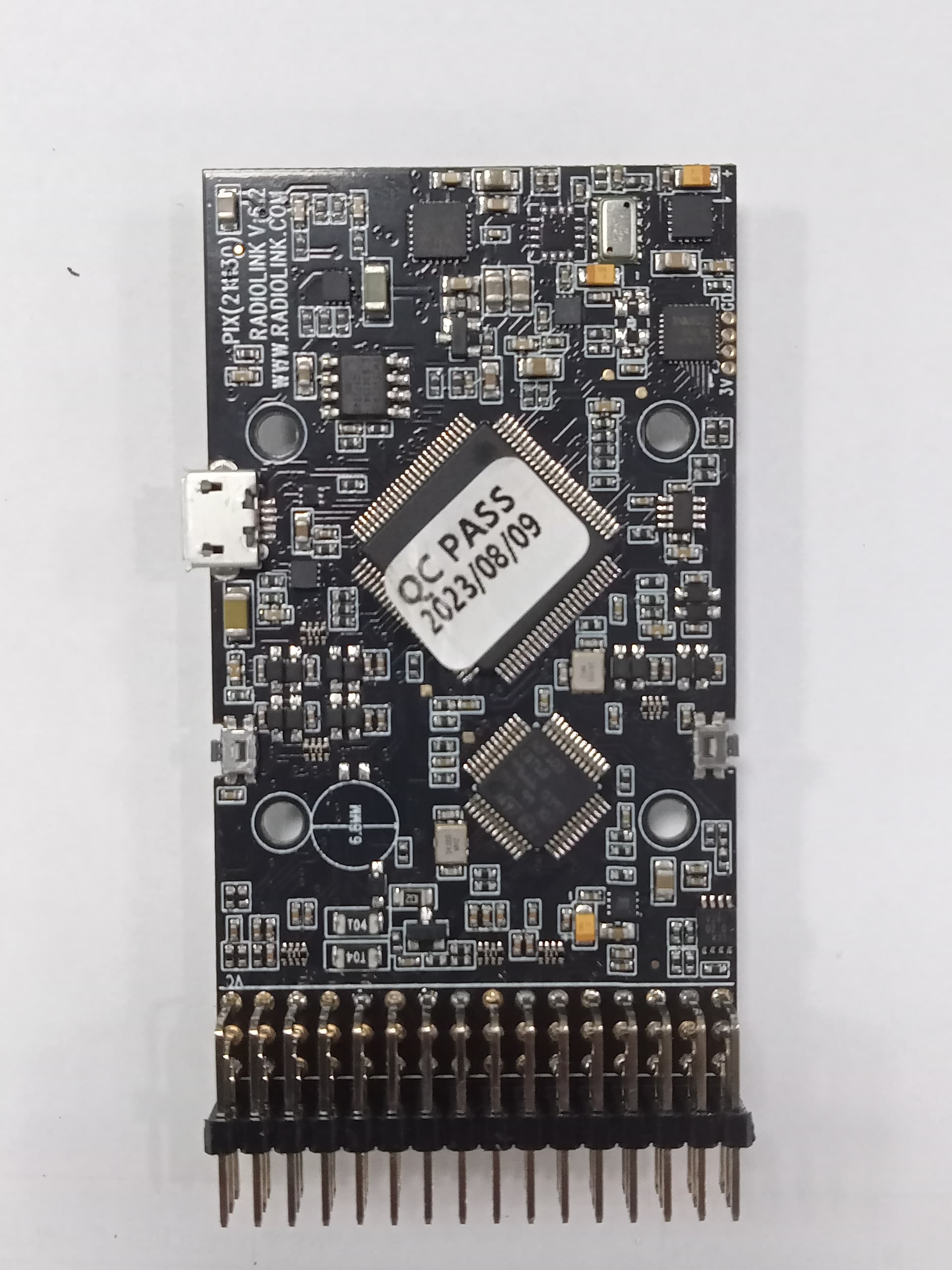
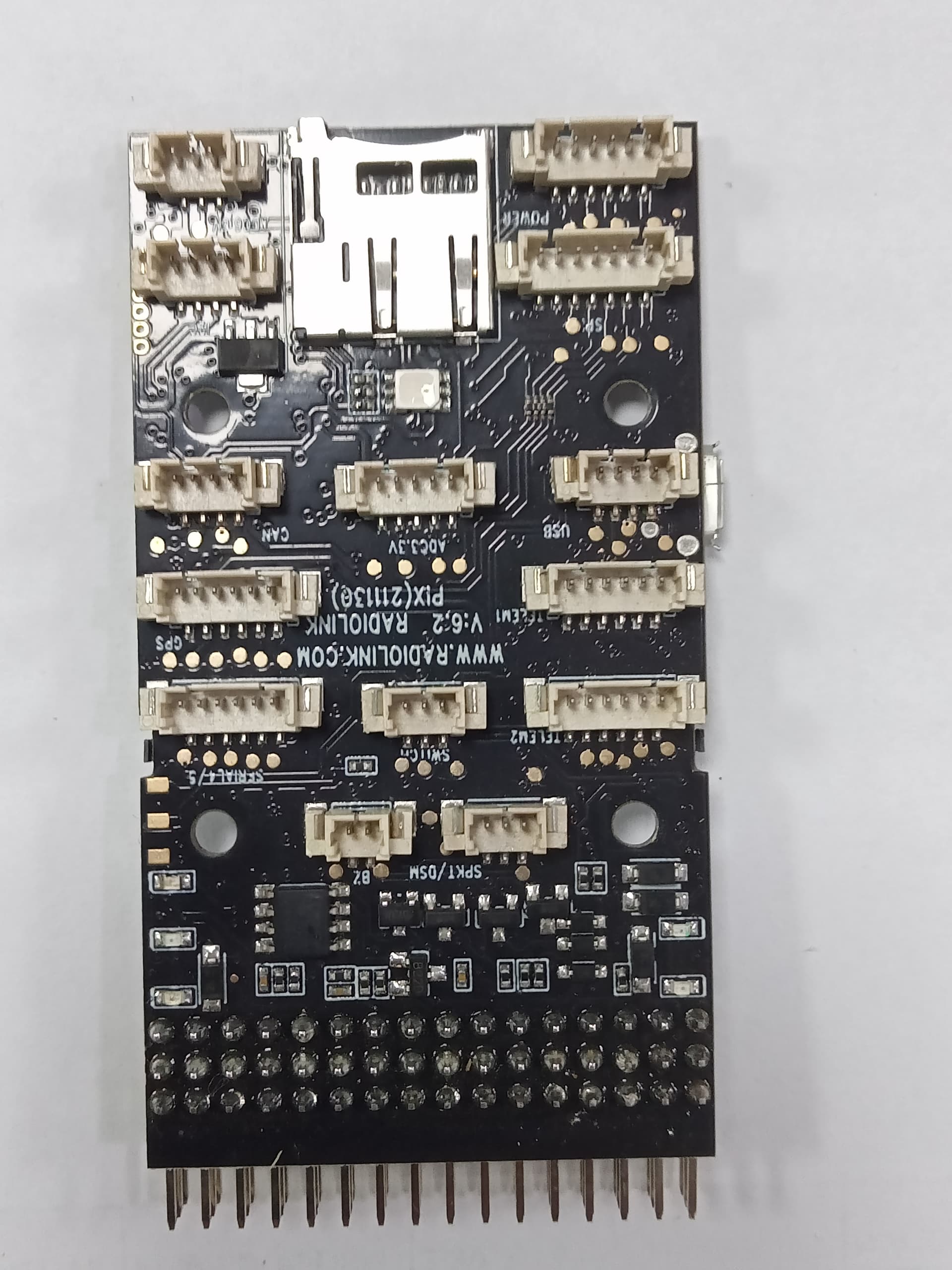
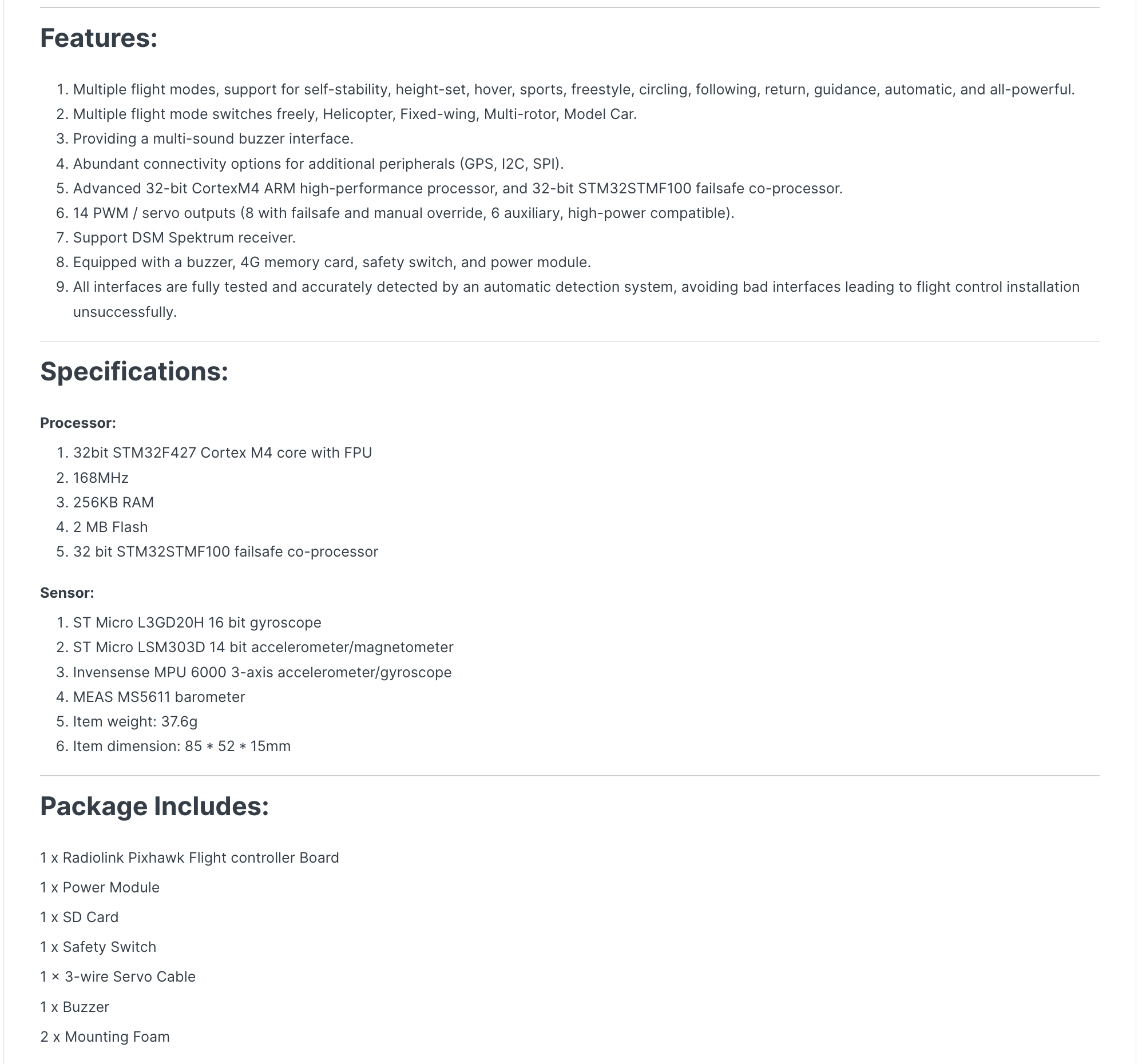
Here are the photos of the RadioLink Pixhawk. It says it supports fmuv3. I have found that The ciruit diagram of this board is little different from standard Pixhawk 2.4.8 board from other vendors. Hope this information will help you to provide some help to me.
I would like to know what is the way to know if given boards supports PX4? will it be there in some spec? - I could not find anywhere in the spec of this FC.
I’m afraid I don’t know. I have never seen this board before but of course I haven’t seen all the clones out there. If ArduPilot works, I suggest to use ArduPilot. And otherwise you have to ask the seller what sensors are on the board and then adapt the PX4 config accordingly.
Thanks @JulianOes for your reply. I received confirmation from RadioLink Customer Support Team saying that this board is not compatible with PX4.
To make it work with PX4, it may require understanding many different elements at hardware level and configuration level (Still there is no guarantee that it will work) as you have already mentioned.
Here I am attaching high level spec details of this RadioLink Pixhawk and you can please check if there is any easy way to tweak it to make it work with PX4
If RadioLink wants to make a pull request to PX4 to add support, or pay one of the consultants to do so, that would be great. Otherwise, I’m afraid, I won’t dive into this as the board’s spec/hardware as it is rather outdated anyway, and I would recommend using autopilots based on STM32H7 (or similar) rather than STM32F4 boards.