Hello all,
While I test the UGV rover, I notice that current master version fails to conduct a planned mission.
I am not sure whether this issue is known or not. Just in case, I would like to mention this issue in here.
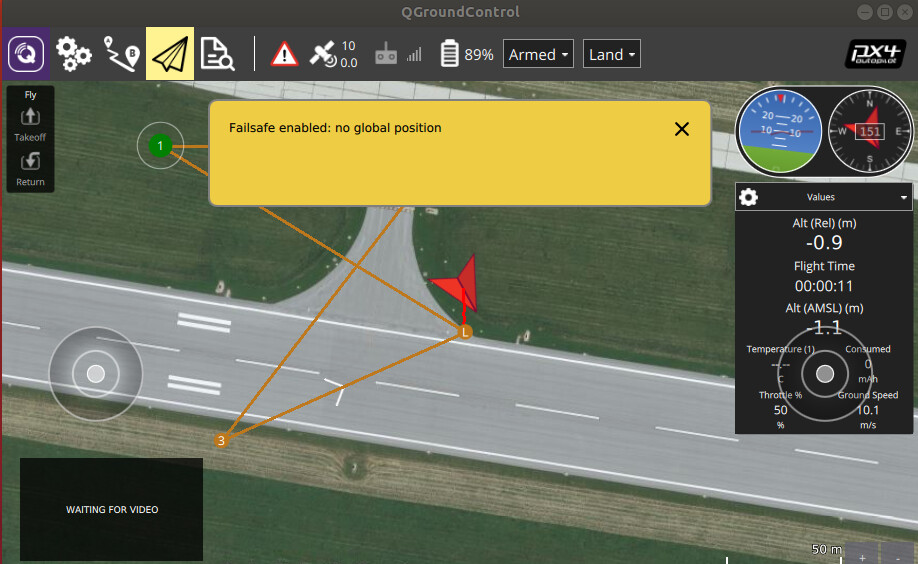
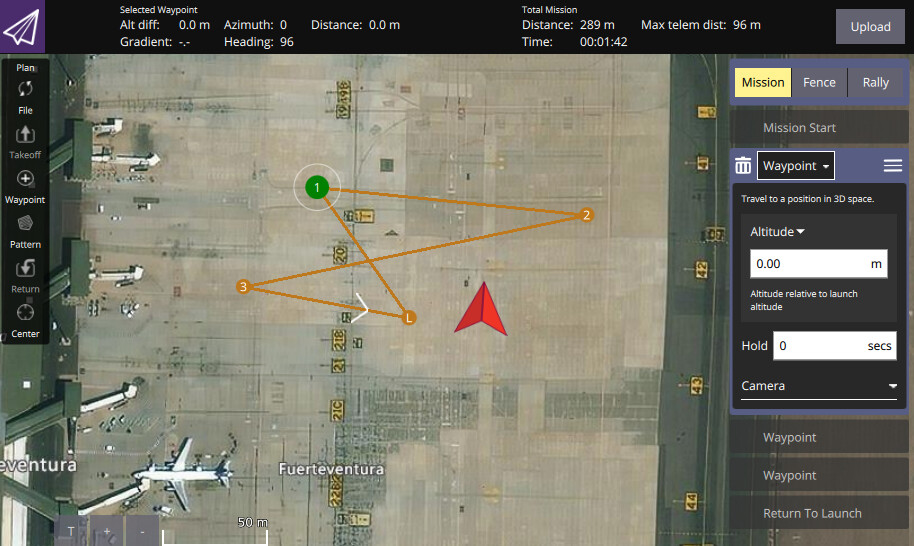
The mission consists of three waypoints and return to launch. The rover just keeps changing yaw angle and then it leads to the fail-safe.
Test version: 76a8617529af2b5268669e5d4487e29249a43788
Log: https://review.px4.io/plot_app?log=e5b9a4ee-03a6-44f9-831f-a6e87e74b332
Thanks!
@HyungsubKim The log shows a global position failure.
In order to execute mission mode, a global position estimate us required for rovers.
Does the vehicle have adequate gps signal to have a valid global position estimate?
1 Like
@Jaeyoung-Lim Thank you for your feedback!
It seems likely to me that the global position estimation was okay.
FYI, I have attached the mission and video.
https://drive.google.com/file/d/1peYSSjJJoMjlYonM0Dsd4WB7wm2KRbyH/view?usp=sharing
Did I set something wrong?
@HyungsubKim Could you elaborate on why you made the conclusion that the global position estimate was okay? I see that you are running SITL simulations for rovers. Which vehicle is this?
My comments are on the QGroundcontrol message saying that the vehicle is entering failsafe mode due to “no global position”
@Jaeyoung-Lim
I thought that GPS was okay due to this message: “[ecl/EKF] starting GPS fusion” before taking off.
However, I have been testing more scenario and noticing that this issue happens whenever the current flight mode requires GPS such as RTL and mission modes. If the flight mode does not need GPS signals such as manual, it works well.
How can I reproduce your issue?
@Jaeyoung-Lim
The issue could be reproduced as in the following steps:
- make px4_sitl gazebo_r1_rover
- commander mode manual
- commander arm
- Increase throttle
- commander mode auto:rtl
Update: “iris optical flow model includes a Lidar rangefinder” shows the same issue.
The following steps lead to the issue:
- make px4_sitl gazebo_iris_opt_flow
- Take off
@HyungsubKim I will be looking into this
Although, what do you mean “same issue”? Does the iris_opt_flow also go into failsafe mode?
@Jaeyoung-Lim Thanks! Yes, the iris_opt_flow also triggers the failsafe mode.
@HyungsubKim I can confirm the problem with the r1_rover.
While this is being resolved, the default rover model works without any issues so you can still test rover logic with the rover model
1 Like