Hey!
I make some first tests on simulation with Gazebo and a rover model.
I’m using Gazebo 9 and PX4 v.1.11.0.
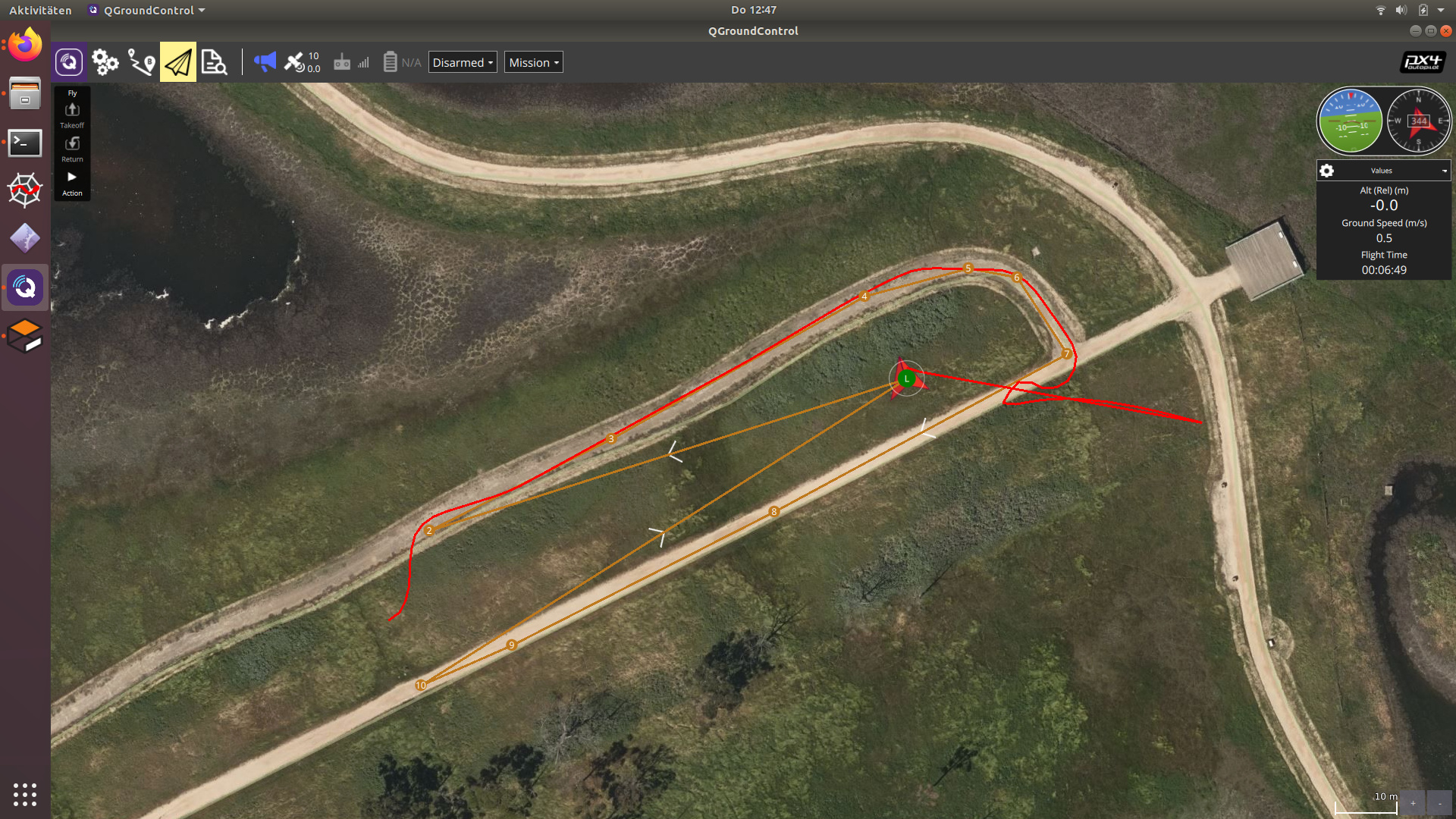
Starting gazebo with a rover model in the world “Baylands” works fine on Ubuntu 18.04 and ubuntu 20.04. When planning a mission I removed the Takeoff waypoint to ensure the minimum altitude. Speed is set to 5.0 m/s and vehicle type is Rover. Altitude of every waypoint is “Altitude Relative To Launch” = 0.0 m
But after completing the half mission error with the global position occurred. The messages in QGC are:
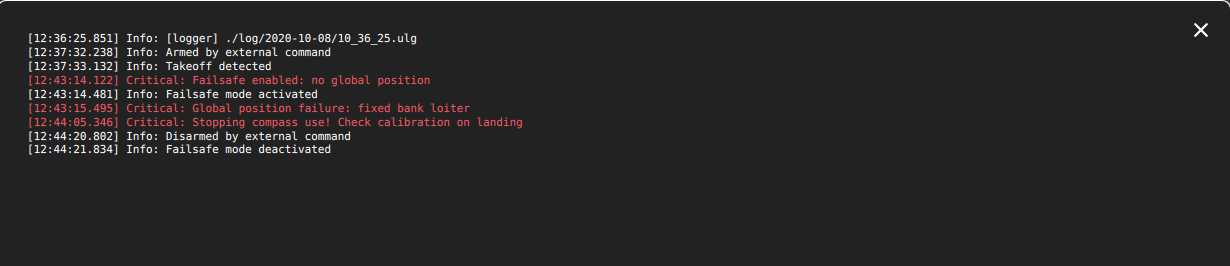
Critical: Failsafe enabled: no global position Critical: Global position failure: fixed bank loiter Critical: Stopping compass use! Check calibration on landing
This is the output from QGC:
And my logfiles:
https://review.px4.io/plot_app?log=f8744149-0e48-49ea-b624-e0909d8ca384
Do I have to change settings or are there any issues with rover simulation?
Thanks!