Hi. I have a question about actuator tab and control allocation to understand how can I build a generic fixed wing airframe with twin motor. And how can I enable differential thrust for it. I have some experience with dual motor tailsitter and generic fixed wing airframes. For dual motor tailsitter PX4 using differential thrust by default and it was working quite good.
Now I want to build an airframe with twin motor on wings like FT Crusier model(FT Cruiser - Build | Flite Test). How should I configure actuator tab. I have two idea :
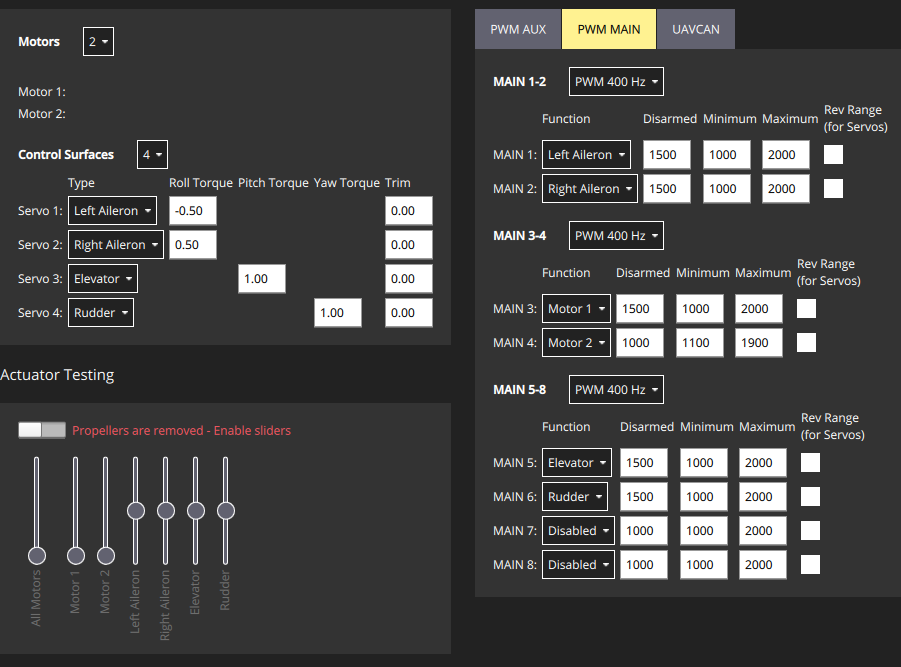
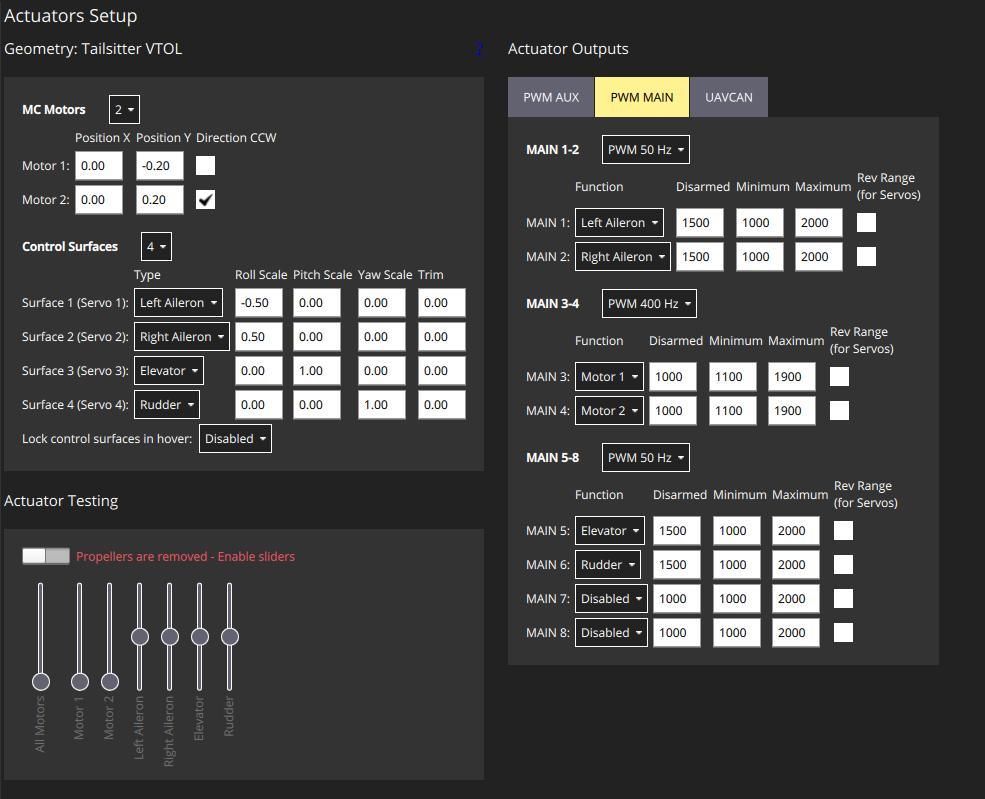
1)Should I choose generic aircraft and add one more motor. After that enable VT_FW_DIFTHR_EN parameter? Like this:
As I understand from source code differential thrust effect handling in fixed wing rate controller and same for all vehicle types as long as flying in fixed wing mode. Differential thrust questions in forum a little bit outdated and not detailed enough. Before start building I’m trying to collect foreknowledge as much as possible. Thanks for your helps.
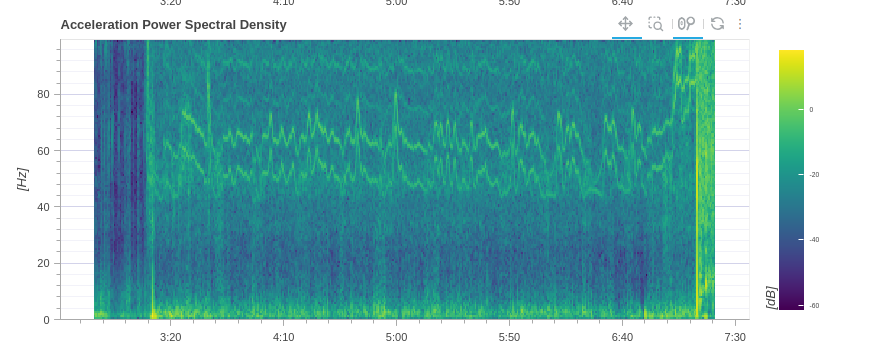
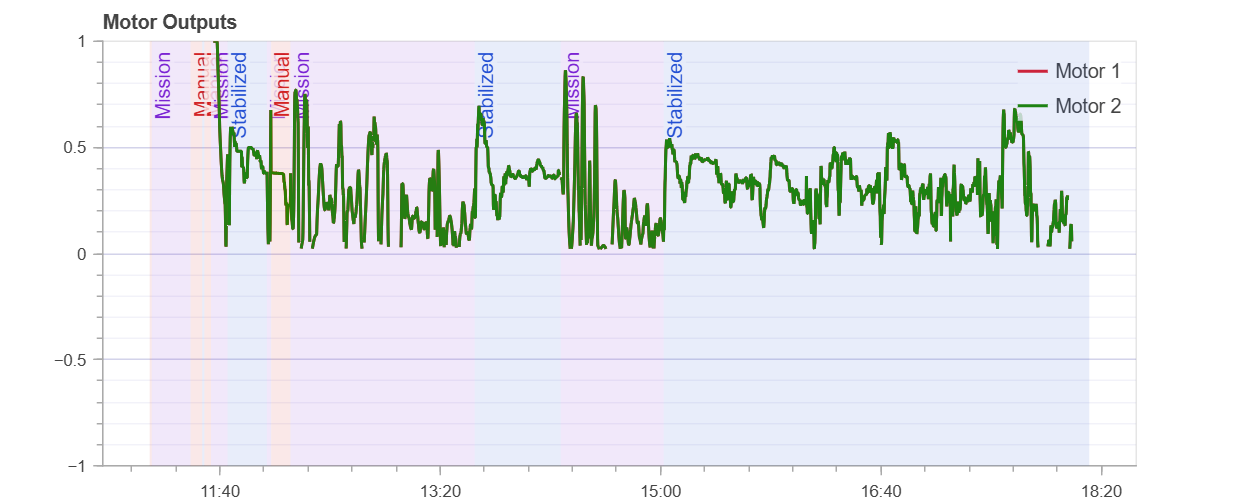
Hi again. I tried without differential thrust without any problem but in log files it is quite obvious there is a little bit difference between motor rpm values during flight with same motor same prop(CW CCW) and same ESCs. (If I’m not wrong about interpreting the plot.)
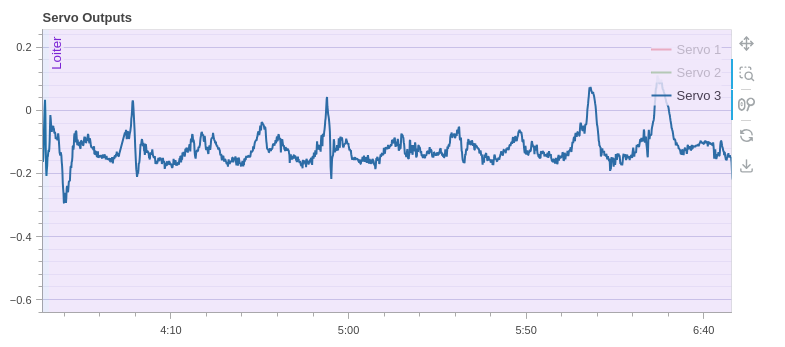
Due to scale of the vehicle I think this difference compansated with rudder. Again in log data rudder always deflecting into one side. I don’t sure about that this deflection occured due to continuous loiter movement or other reasons.(Like adverse yaw compensation but FW_RLL_TO_YAW_FF parameter was 0.) I guess I should take a log again along a straight level flight.
To sum up I think we need a differential thrust document. And differential thrust required for twin motor airframes for optimal solution. Even for tailsitter airframe there is not enough information about that. I’m not very experienced about log review and I’m only trying to test something. If there are parts that I have misinterpreted, I would be very happy if experienced people could contribute to this issue.
Are you using a pwm ESC, if so have you tried ESC calibration. I think your plane’s rudder is consistently to one side due to the difference in RPM output from the ESCs on both sides at the same input. I’m also trying to get my airplane to be able to achieve differential thrust, but I’m finding that the PWM signal output to both sides of the ESC is the same no matter what.
With my testing I can see that the output to both motors is exactly the same.
I also think making differential thrust available to all fixed wing airplanes would be a useful thing to do, especially if some people want to achieve small radius turns, or if the ailerons or rudder fail.
I calibrated ESCs from radio by using beep tones. Not tried to make it from QGround. Same signals in actuator tab connected to motors. I was thinking esc calibration from qground is important for multicopters.
After esc calibration I mesured rpm of both motors and also there was a difference about 50-100 rpm. Should I use ESC calibration steps in user guide also ? (ESC Calibration | PX4 Guide (main))
Thanks for your reply. I wish to contribute this topic if I can. I continue to test twin motor flight tests already. I hope I can participate to development process. I’m following the topic. Thanks again.