I’m currently trying to integrate a Trimble MB-Two onto the pixhawk 4 to eventually do RTK DGPS, like this webpage discusses .
The Pixhawk 4 works normally and has a recent version of released 1.9 PX4 (configured as a coax octorotor). The stock holybro GPS/Mag works without a problem.
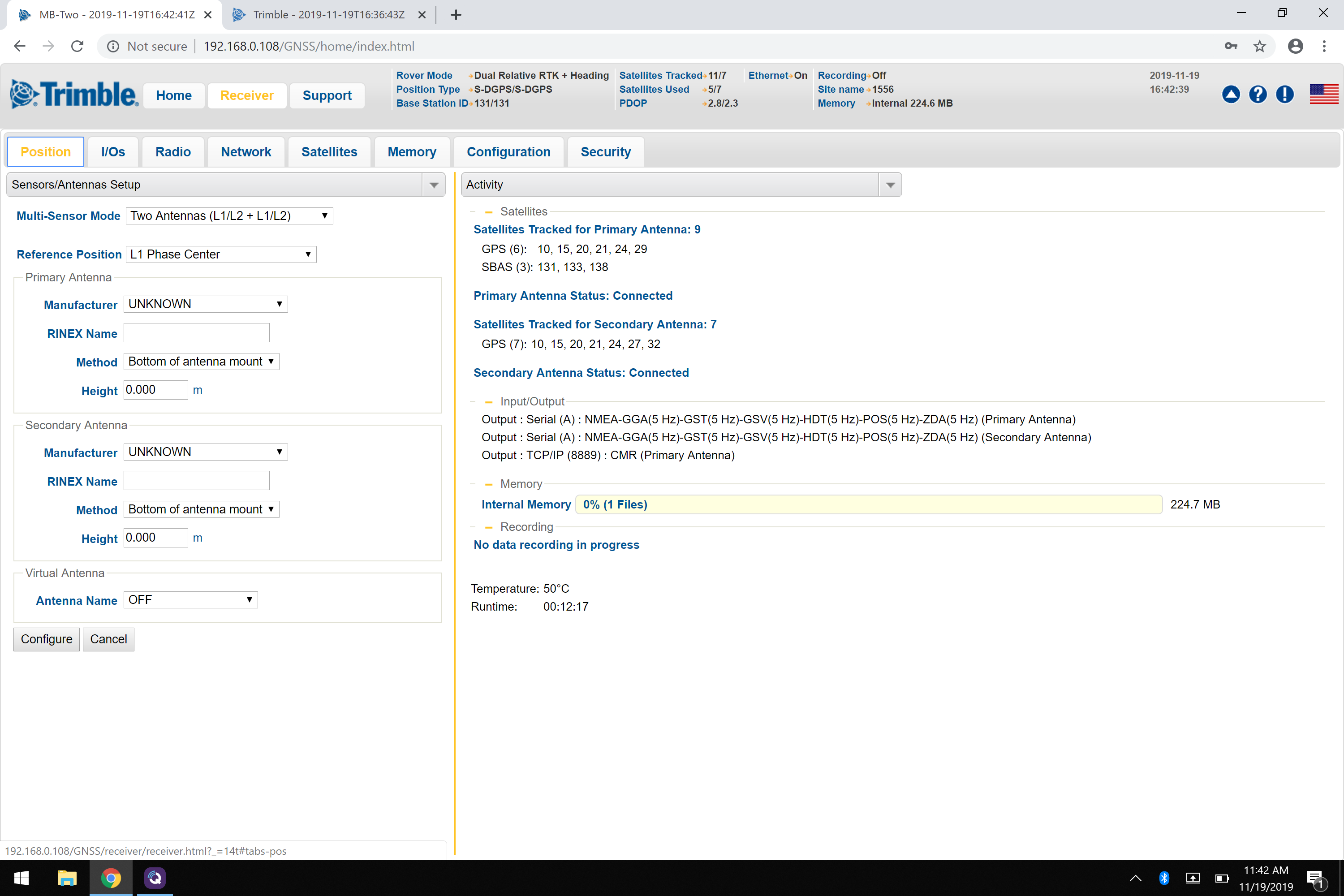
My MB-Two is an evaluation unit that has all the features required in that linked webpage. It has Rover and Base options enabled.
I unplugged the Holybro GPS and plugged in the TX1 RX1 lines from the Trimble into the GPS port as instructed in the webpage.
I don’t know what to setup the IO from the Trimble. I have tried many options.
I looked in the GPS driver code and surmise that it uses an ashtech protocol and uses the ZDA, GGA, HDT, POS, GST, GSV messages. So I set Port 1 to output those messages at 10Hz. However, even though the GPS is seeing plenty of satellites, the QGround control says go GPS Position.
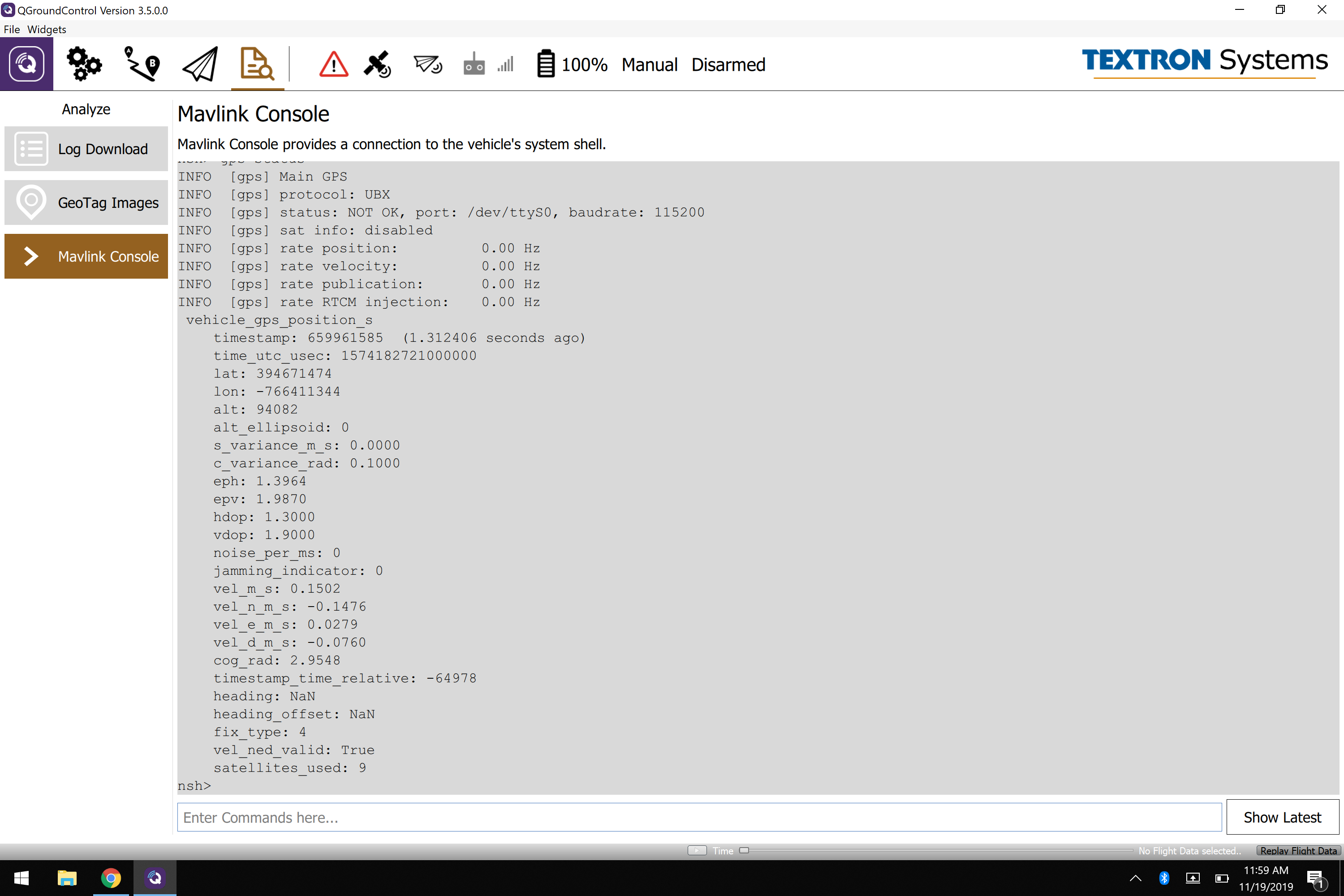
When I go to the mavlink console and ask for GPS status. It says that GPS is not OK (at the correct 115200 baud) and displays a different protocol UBX, ASH, MKT etc for each status refresh.
Tried all manner of reboots, starts and stops.