hello everyone,
I have a bms that I designed myself. I will use the navigator system, which is the new system of bluerobotics, together with this bms in my unmanned underwater vehicle. I’m thinking of communicating with Uart. But I couldn’t find any information that will help me to transfer this bms information to which file in qgc. How do I transfer the data I get from uart to which file in qgc?
QGC communicates via MAVLink: Introduction · MAVLink Developer Guide over some serial link.
So you will want to send Messages (common) · MAVLink Developer Guide
There is a little information on the QGC-side integration with MAVLink here: MAVLink · QGroundControl Developer Guide
@Aysenur_Cam
I have the same question you have.
By the way, I’ve never heard of the word ‘bms’, but what does it mean?
yes it is battery management systems
Thank you for your reply^^
I wonder if you found the answer you were looking for. If you found it, could you share the information?
yes, if i can do it myself i will share
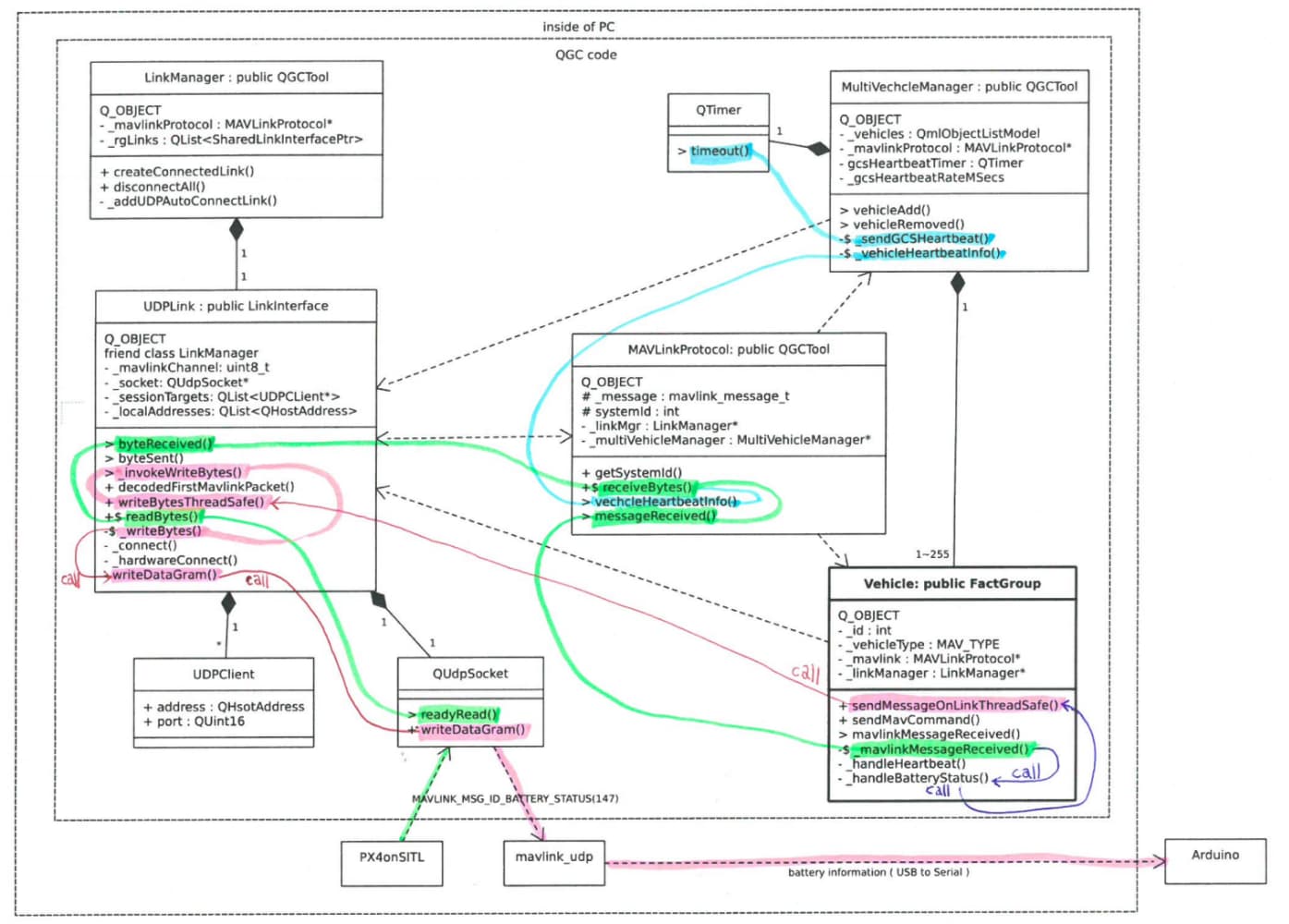
In my case, I looked at the above classes to pass battery information to PX4(onSITL) → QGC → Arduino.
UML was written with QtCreator’s Model Editor, but I’m not familiar with UML, so the picture may be inaccurate. I don’t know if it will be helpful.