Hello All,
I have read through the development guide, but it is still not clear, how VTOL works. I could already make 2 mixer files. One for the quadcopter mode, and one for the airplane mode. The airframe files in the init.d directory are not so clear for me, and the guide was not too detailed.
How to continue? Can somebody explain, or give me a link to a document?
I have used KK2.1 controller in the past. There the concept was: I could make 2 parameter sets (1st for the quadcopter, 2nd for the airplane). I had to set in percentage, where is the transition mode in between. E.g. :
Quadcopter: 0%
Transition: 25%
Airplane: 100%
I could select the mode with a 3 position switch from the RC (so just manual transition, no speed control). The controller mixed the parameters from the 2 parameter sets according the percentage, what I have set in transition mode.
Thanks
Laszlo
Hi Laszio,
First of all it would be best not to compare a stabilizer with an autopilot. That’s like comparing a 3D printer to Playdough.
What kind of vehicle do you want to control? most standard VTOL vehicle types are already supported so there would be no need to write your own mixers.
Hi Sanderux,
I did not want to compare, just wanted to show, where is my knowledge level. I am starting from here to learn PX4 
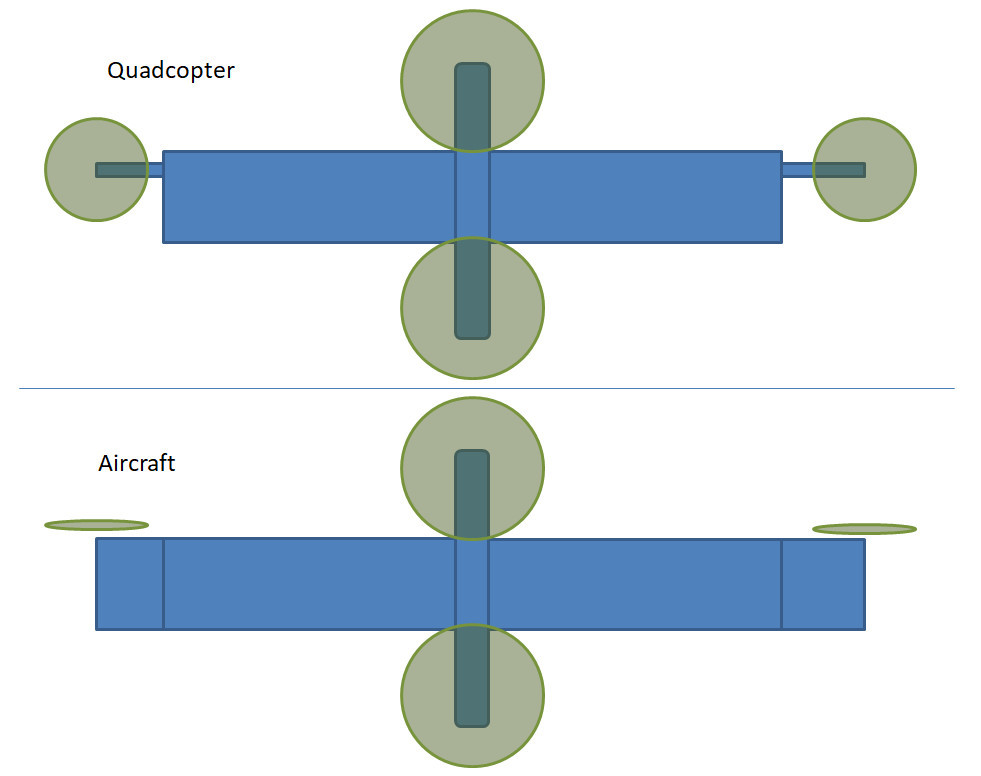
My vehicle is not available in the list. It is a mixture of a + quadcopter and an aircraft. There are 2 rotors over the fuselage, and 2 others at the end of the wings. The 2 wingrotors can tilt to work as prop. The rotors are driven by a petrol engine, so all rotors have the same RPM. The blades of the rotors are adjustable by servos. It does not have conventional aircraft control surfaces, because I would like use the rotors and the tilt wing-ends to control the aircraft mode as well. The main rotors are rotating in aircraft mode as well, but the angle of the blades are around 0 deg, till no pitch control is needed. The main rotors can also help out the wings during transition to make it more safe.
I have made a simple picture:
Laszlo
Have you tested if this design will actually fly?
Spinning horizontal motors during fixed wing flight is usually not a very good idea
No, I have not tested yet.
You mean the rotors over the fuselage? What can be the trouble with them?
They would become an immense drag. try and envision it in a wind tunnel
I will test it. If yes, then I can try to find a clutch to stop them during the aircraft mode.
Anyway, I have to find out, how I can make special control with PX4. What is your opinion, do I need to modify code, or it is solvable with config files (mixer, airframe, etc.) ?
i think you can base it on the tilt rotor mixer
Sir, If you are interested in quadcopter + plane than you will find lot of information in http://ardupilot.org/plane/docs/quadplane-support.html
If you are interested in only two rotor with copter + plane , where two rotor tilt by servo , than there firmware i think in under work and may be available in future in mission planner.
Good luck with your new Design. . Happy fly
sanderux,
Can you write me in brief, how to set the 2 kind of parametersets? How to define for the system, when use which one? Is there any “if” function? Or what is the theory?
Thanks
Yogesh_Sonar,
Thanks for the page. There are a lot of useful info on it. I will use them during the setting process.
However non of the existing config fits to my design, so I would build up the control from the base stones with the custom mixer, what look really useful, just I dont understand, how to handle the 2 parametersets. How to set, and define their usage for the system.
Laszlo
Yogesh_Sonar: the link you posted applies to Ardupilot, not PX4.
lkiss10: there is no way to do this briefly, the vtol system is very broad.
Normally before you attempt writing a vtol configuration you would first try to fly the plane as airplane and tune it correctly, then fly it as copter and tune it correctly. When all of that is done you move to configuring vtol.
Some info on mixing can be found here: https://dev.px4.io/en/concept/mixing.html
Yes, it is Ardupilot page, but includes some good summaries (e.g. ground station softwares, VTOL features).
Yes, I have read this page, so I understand, how to build the mixer file. I made 2 mixer files, what I have to fine tune of course (my quad is not finished, and the Pixhawk not arrived yet). I have built a test bench, where the quad is fixed to the ground, but can rotate in all 3 directions, and I can fix the axles one by one. It is not the same as in the air, because the turning point is not in the weight point of the quad, but it is good for the first test. I have tried it already with the smaller electric version and KK2.1.
I also plan to make a bigger bench, where the quad will be fixed by rubber bends, so it will be very close to the real flying. However the aircraft mode test is a question mark yet.
Then, what is the next step?
On a vehicle like that it seems unfeasible to fly it as pure fixed wing first.
When you get your pixhawk, install your mixer files and configure it based on a regular tiltrotor (copy the param set commands from an existing tilt rotor)
Then try to get your quad working and your transition switch working. then bench test a transition by blowing in the airspeed sensor or setting it to airspeed sensorless mode.
If you have quadchute enabled and you see on the bench everything working good and quad mode is working good you should be alright to try a fixed wing flight keeping your hand on the transition switch
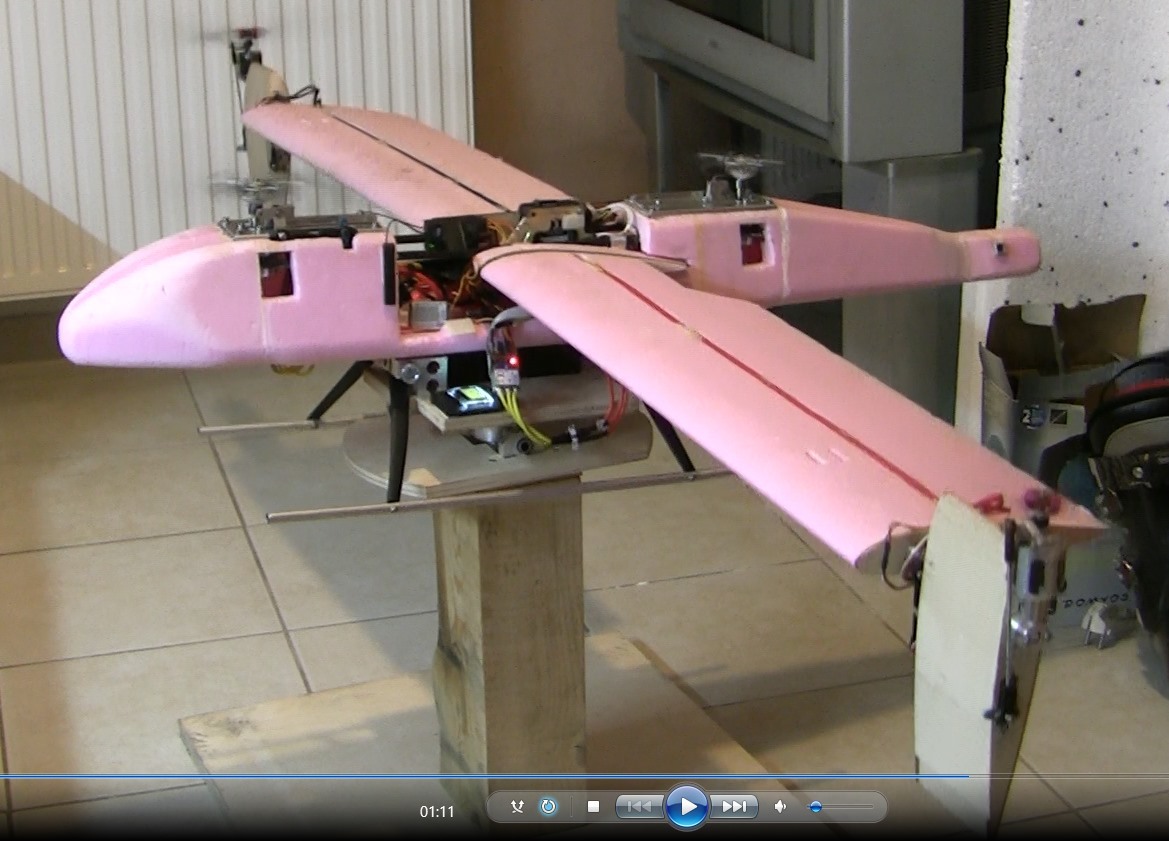
You can not see it well in the picture, but the wing is fixed very well to the body. It has a stable carbon-, alu tube and alu block frame and the foam is just the body on it.
Ok, I will try to follow your recommendation. Thanks.