I have built a VTOL from a X-UAV Clouds Airframe with 4 lifter motors and one pusher at the tail. The plane flies well in MC mode and also Fixed Wing mode. Some transitions went well, some didn’t. I am only concerned about transitions to fixed wing flight. Back transitions always work without a problem.
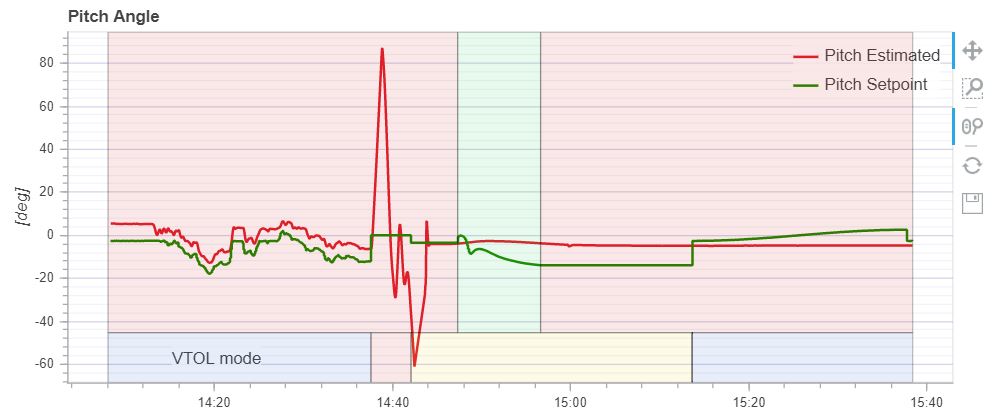
The problem with forward transitions is that the plane always pitches up when I flick the switch. When it’s windy (and the nose is pointed into the wind) it can even end up in half loop. In the log files I have found the following:
You can see the offset between Estimated and Setpoint Pitch. I always have this offset, but the plane flies perfectly level in MC mode. When I flick the switch for the transition, the green line shoots up to zero the Pitch Setpoint. But the Pitch angle already was actually zero, which means the plane pitches up. Then the wind catches it and flips it over. This one ended in a very soft crash without any damage in high grass.
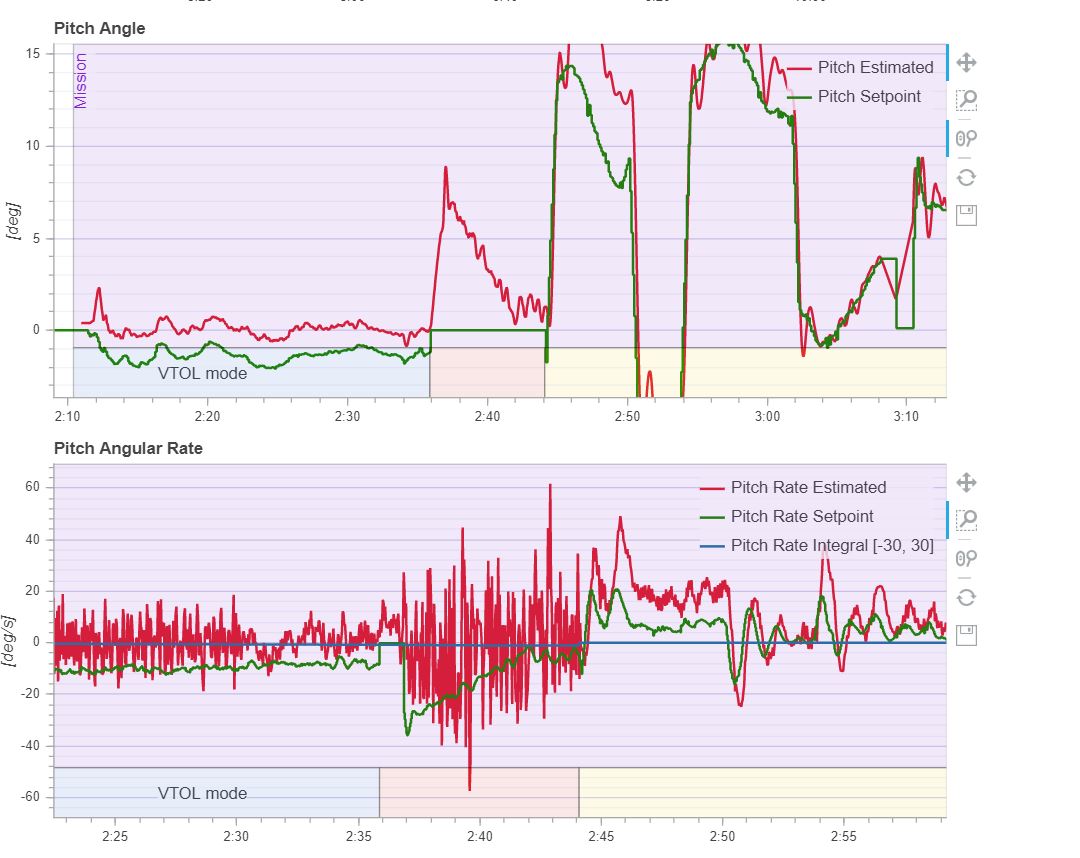
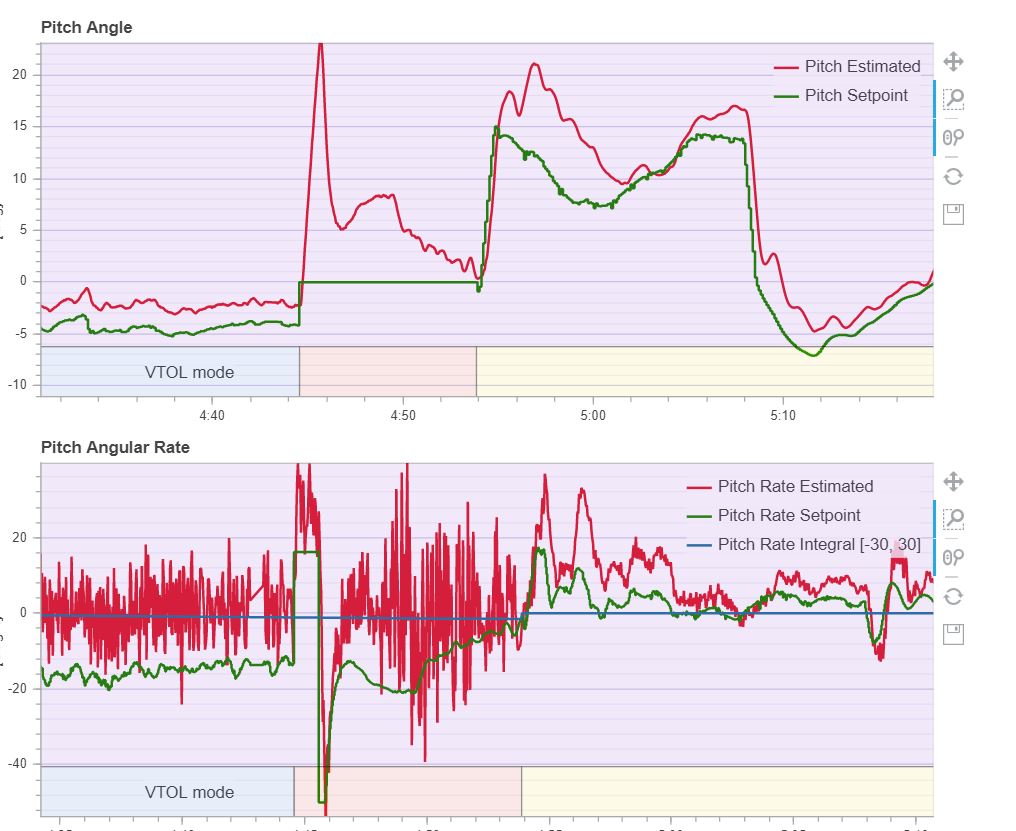
Here is another graph from a transition that didn’t end up on the ground but also showed a significant pitch-up tendency:
My gut feeling tells me I need to get rid of the offset between the green and red line which means working on the Level Adjustment.
Btw, in a level multicopter hover with absolutely no wind, the artifical horizon in QGC is not level. The plane hovers level in Manual and Position mode without stick inputs (as long as there is no wind).
Please help, I am a bit out of ideas at the moment.
@wov Hello, I have encountered the same problem as you, sometimes very good, sometimes not good, this problem will be more serious when there is wind, do you solve the problem?
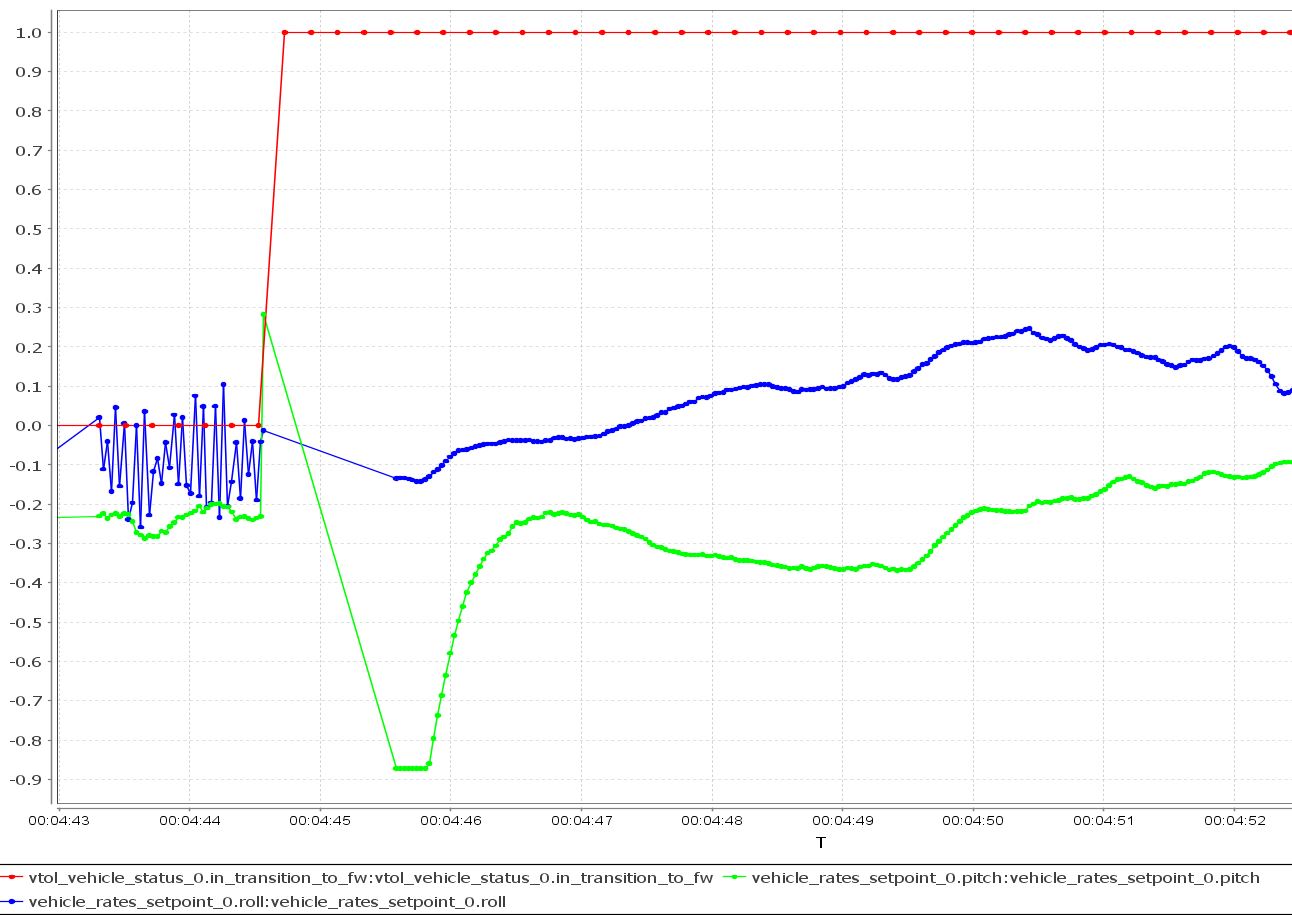
Thanks, below is my flight log, I used flightplot to check the situation within 1s seconds of the beginning of the transition, vehicle_rates_setpoint0.roll and pitch are interrupted, I think it is because this caused the aircraft instability. I did a simulated flight of 1.9.2 and 1.10.0rc1 on Gazebo, and I feel that this problem has been solved. When I fly forward in a multi-rotor state (-15 degrees) to fixed-wing mode, 1.9.2 in the conversion, the aircraft will rise sharply, sometimes reach (>40 degrees), and even appeared Damaged; and 1.10.0rc1 has no such phenomenon, the transition is very stable. I hope you can help me confirm whether the problem is solved and I will conduct flight verification again when possible. https://review.px4.io/plot_app?log=0806d115-659f-44d6-b245-f45acfd56085