Hi,
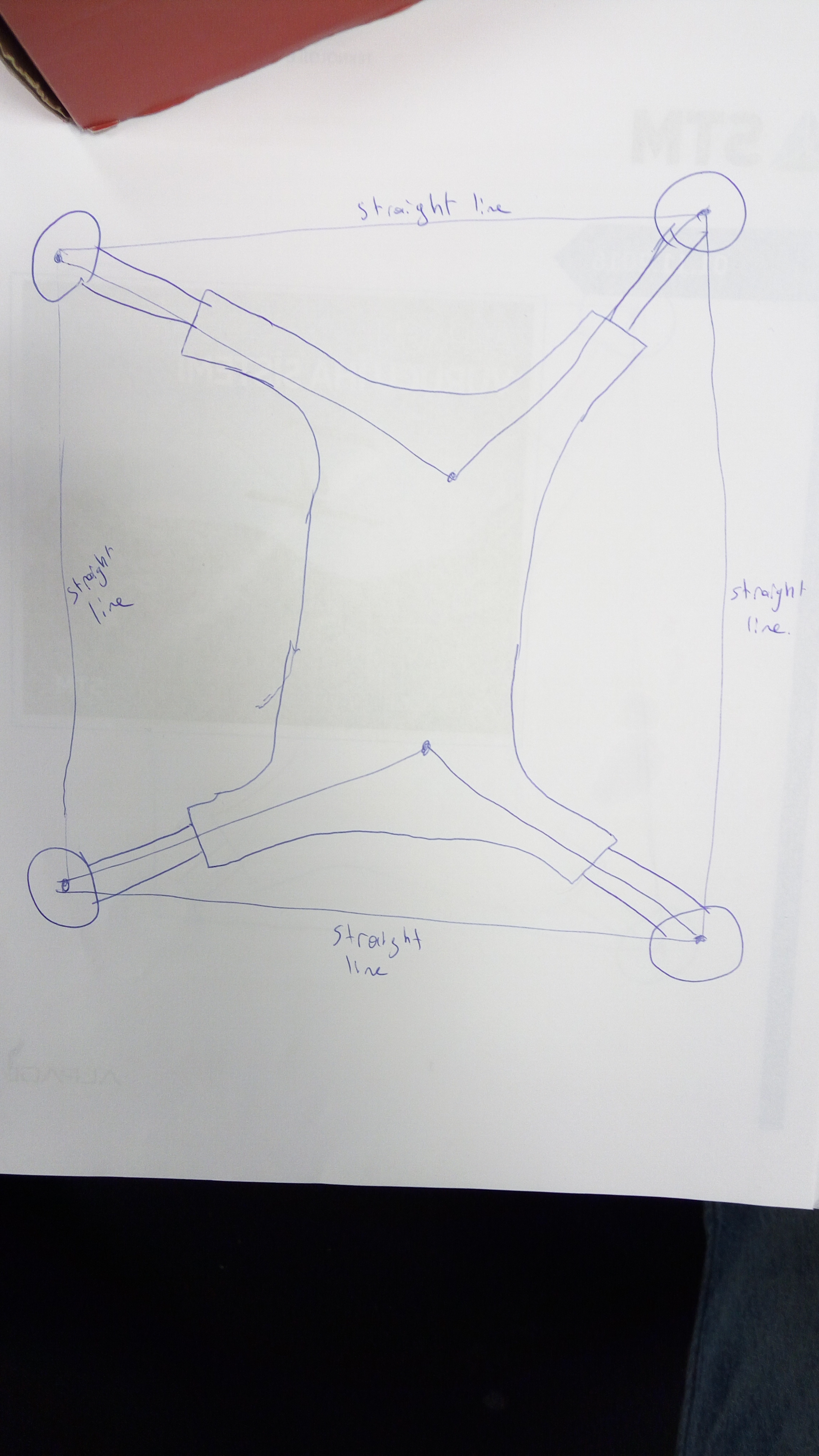
I have a custom designed x4 multicopter frame which is very similar to 3DR solo. The hand drawing is attached, sorry my bad drawings. The drone overall is nearly 6.5 kgs, and i use MN4014-9 400KV motors with 16" propellers.
For some tuning and stability tests, we observe the multicopter has unstable behaviours in HOLD or POSCTRL mode using INAV estimators. It climbs and can not hold altitude. We are digging the rates and attitudes PID gains to have more stable HOLD and position control before flying a mission autonomously. Should we use quad_x mixer in the attached drawing? Also any suggestions about PID tuning looking at drawing? I also have flight logs in HOLD and POSCTRL mode. We observe also not stabilizing the altitude hen it is in HOLD or POSCTRL mode after we manually takeoff.
Today i have tested the same configuration with only changing pixhawk to original 3dr hardware, everything works fine and the autonomous flight was perfect with too much waypoints.I added also a vibration damper under pixhawk but i dont know if this was the difference. Also the wind conditions was better today but i think the root cause was about pixhawk sensors. because when i measure the z acc values in landing, the working pixhawk’s measurements were arpund 9.8 and the other one which couldn’t hold its altitude and had z acc values greater than -20 was around 11. I suggest everyone to carefully check their hw before autonomous flight. becaise most of my failed flights were coreected by only changing the pixhawk or the external compass. also, i crashed the drone while manually takeoff before starting the previous failed autonomous flight because of rc calibration failure. i think these mems sensors are sensitive to these crashes while powered on. if u face with a crash, then check if these sensors are affected by the crash because they are electro-mechanical.