Hello everyone,
I’m a beginner and currently learning to fly quadcopters.
I’m building a 10-inch quadcopter X with the following setup:
Flight controller: Pixhawk V6C Mini
ESC: GEPRC GEP-BLS 60A 4-in-1
Motors: 900KV
Propellers: Tarot 10-inch
Receiver / RF module: BetaFPV SuperX Mono ELRS
Radio transmitter: RadioMaster Boxer
Battery: Tattu 16000mAh 6S
Total takeoff weight: ~3 kg
Firmware version: v1.16.1
During flight, the quad takes off normally. However, after I increase throttle and start flying forward, the quad suddenly loses lift and crashes for an unknown reason.
I have reviewed the flight logs, but I still cannot clearly identify the root cause.
I noticed high vibration levels in the logs. However, before the incident occurred, vibrations did not appear excessive, so I suspect that the high vibration might be a consequence of another failure, rather than the original cause.
The log of the flight crash is here:https://logs.px4.io/plot_app?log=44786aff-37bd-42aa-87c2-7e987d58ca72
If anyone has experience with similar setups or issues, I would greatly appreciate your help in identifying the possible cause of this crash.
Thank you very much for your support.![]()
Your vibrations in X(roll) seem high even before the problem occured.
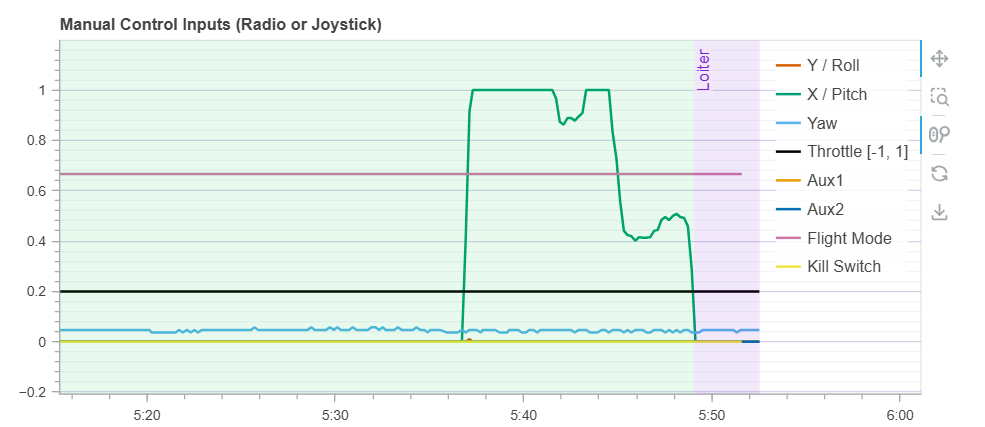
Seems like you pitched max, going almost 20m/s. started to decelerate, got into a oscillation which could not be fixed by the controller.
Have you PID tuned the drone before attempting this type of max forward flight?
I’m talking roll/pitch/yaw rate controller tuning.
I have never tuned the PID before.
However, I have flown this aircraft many times at almost maximum speed without any issues. This time, I noticed that it crashed after flying only a short distance ![]()
Here is a flight log from a previous flight of this quad: https://review.px4.io/plot_app?log=4b20438c-bc5a-4d22-9058-12718730def1
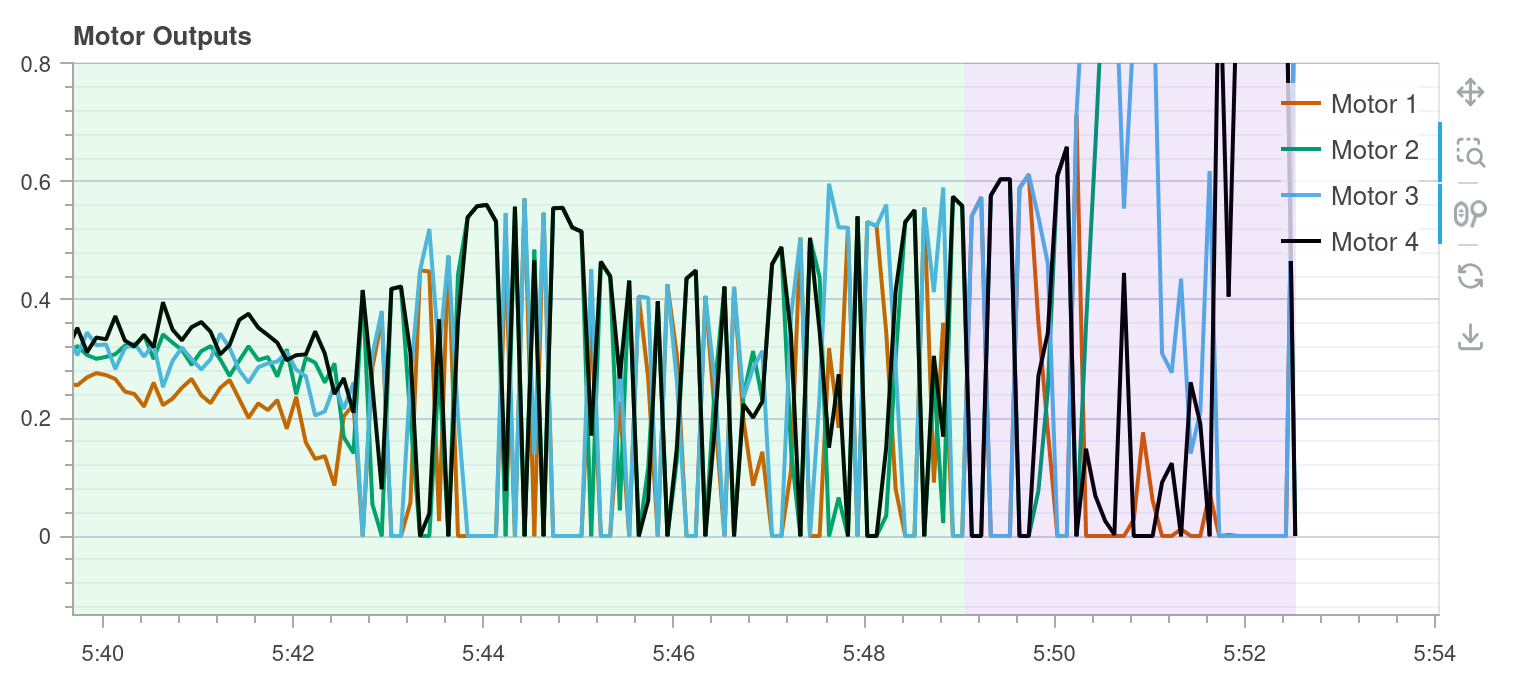
Around 5:43 something seems to change and it suddenly twitches/oscillates a bunch!
The motor outputs suddenly become much more extreme:
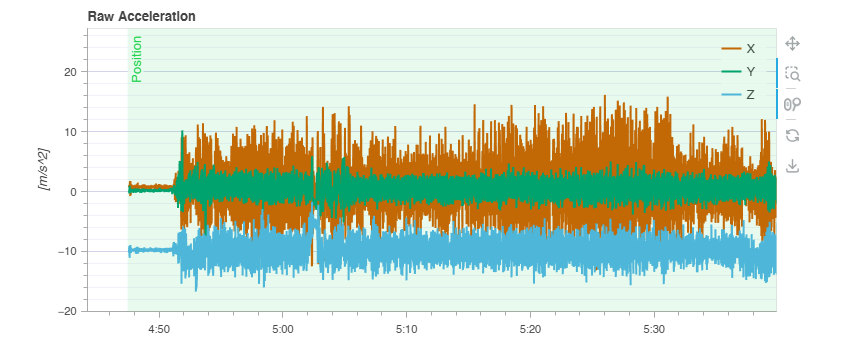
Same with accels:

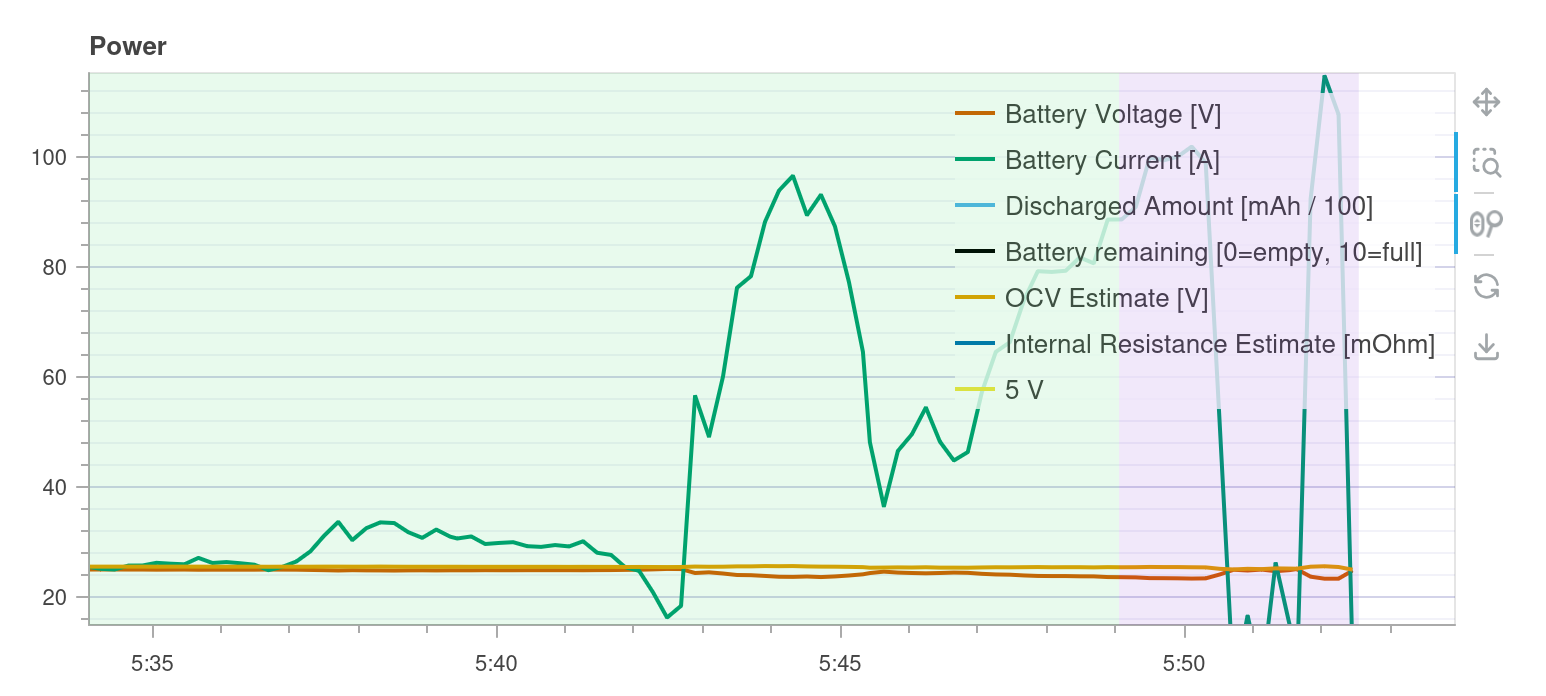
And current use goes from ~30 A to ~80 A!
I haven’t quite figured out what changes at that moment, or what triggered it. The log doesn’t indicate an event.
What did you see/hear/feel at that time? Any hints what might have changed?
I’m sorry for the late reply as I missed the email notification ![]()
Initially, I took off and hovered in place for a while. After that, I pushed the control stick to move the aircraft forward. While it was flying, the aircraft suddenly started spinning in circles and then crashed, so I suspect that there might have been an issue with one of the motors or propellers, leading to a loss of balance.
At first, I suspected a mechanical cause because I had flown this aircraft many times before without any issues, and it was operating normally right before the crash, so the likelihood of a software-related issue seemed low. However, when I arrived at the crash site, the aircraft was already broken, so I cannot be certain whether the root cause was mechanical ![]()
Were all the propellors attached to the motors when you got there?
I was already flying at that time, and the aircraft fell from a height of approximately 30 meters ![]()
Where the circles getting bigger and bigger? That’s usually called “toilet-bowling” and happens if your yaw estimation is off. (Imagine it trying to go North but heading East instead.) That being said, this condition is often caught or at least there would be a warning in the estimator.
Because it fell quickly at a distance of over 200 meters, I couldn’t see it clearly anymore. I only saw that it was spinning in circles while falling ![]()
I see. In that case my guess would be that something got loose mechanically, and lead to the suddenly increased vibrations. I don’t have another explanation at this stage, especially because there is no indication in software of anything changing, e.g. the estimator (and thus sensors) changing.