We’re flying a quadcopter in the standard X configuration with a pixhawk cube on the latest PX4 stable release (1.8).
One of my colleagues ran into an issue where our vehicle was quite stable when rolling along the main vehicle axis (two motors pitching at the same time).
However, we see it go fairly unstable if the vehicles pitches along an arm (one motor pitching down alone).
Which, if any, gains would impact the roll characteristics of the 1&3 or 2&4 rotor pairs such that we can stabilize that mode more directly?
After a quick look, you seem to have huge pitch vibrations…
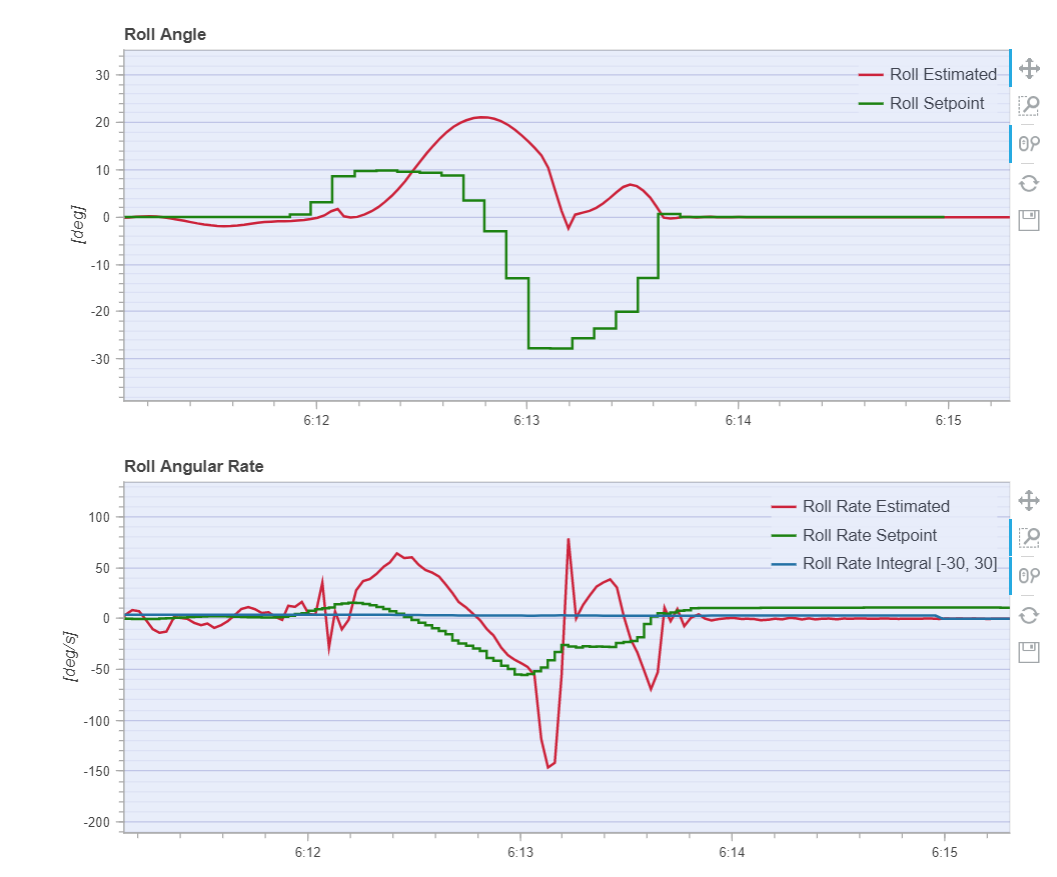
Furthermore, I roll and pitch tracking looks to be always bad, not only when tilting “along an arm”. I can also tell you that you will run into altitude hold problem due to huge Z vibrations. This will completely ruin the vertical velocity estimate.
What’s your platform? Did you balance properly the props? Make also sure that all the components are properly fixed on the frame any loose piece can amplify or generate vibrations.
Normally, you should similar noise amplitude in X,Y and Z axes.
In your log, for the accel plot, X and Y are good, but Z is way too big. For the gyro plot, roll and yaw are good, but you can see that the noise on the pitch (Y) axis is much bigger. If your vehicle is symmetric and that you have the same roll and pitch rate gains, you definitely have to check for a part resonating in that direction or a motor/prop that vibrates.