Hey everyone, I have a SPM4651T receiver that I am attempting to connect to a pixhawk CM4 baseboard with a pixhawk 6X FC. I have attempted to follow some various instructions and fourms without success. Summary as follows:
Problem: Cannot get receiver to communicate with pixhawk. Receiver is paired to radio, but Qgroundcontrol doesn’t recognize radio as on. Seems like pixhawk serial port isn’t configured correctly but not 100% sure.
Hardware:
- SPM4651T receiver
- Pixhawk CM4 baseboard
- Pixhaws 6x FC
Software:
- PX4 Pro stable release v1.15.4
Hardware hookups I have tried:
- SPM4651T → UART4 & I2C
- SPM4651T → TELEM1
- SPM4651T → TELEM3 (Telem 2 is reserved for rpi connection on my board)
- SPM4651T → GPS2
My steps:
I am following instructions on this page, as my receiver uses SRXL2 (Spektrum RC Systems — Plane documentation). Nick seems to have success with a similar setup in his first update here Spektrum SRXL2 connection problem (AR6610T + SPM4651T) - Plane 4.1 - ArduPilot Discourse.
When I open Qgroundcontrol to modify parameters, the only parameters that exist when searching for _PROTO are the following (similarly nothing useful for _OPTIONS or _TYPE):
- GPS_1_PROTOCOL
- MAV_PROTO_VER
- RC_INPUT_PROTO (which I think is for the RC IN port?)
I thought i might be a config thing for the serial ports. Tried to follow this guide (Serial Port Configuration | PX4 Guide (main)), but only have these parameters:
- GPS_1 and _2_CONFIG
- MAV_0, 1, and 2_CONFIG
- MSP_OSD_CONFIG
- RC_PORT_CONFIG
For each port I tried, I changed RC_PORT_CONFIG to match this port. When doing this and restarting, no protocol parameters came up and no connection was established.
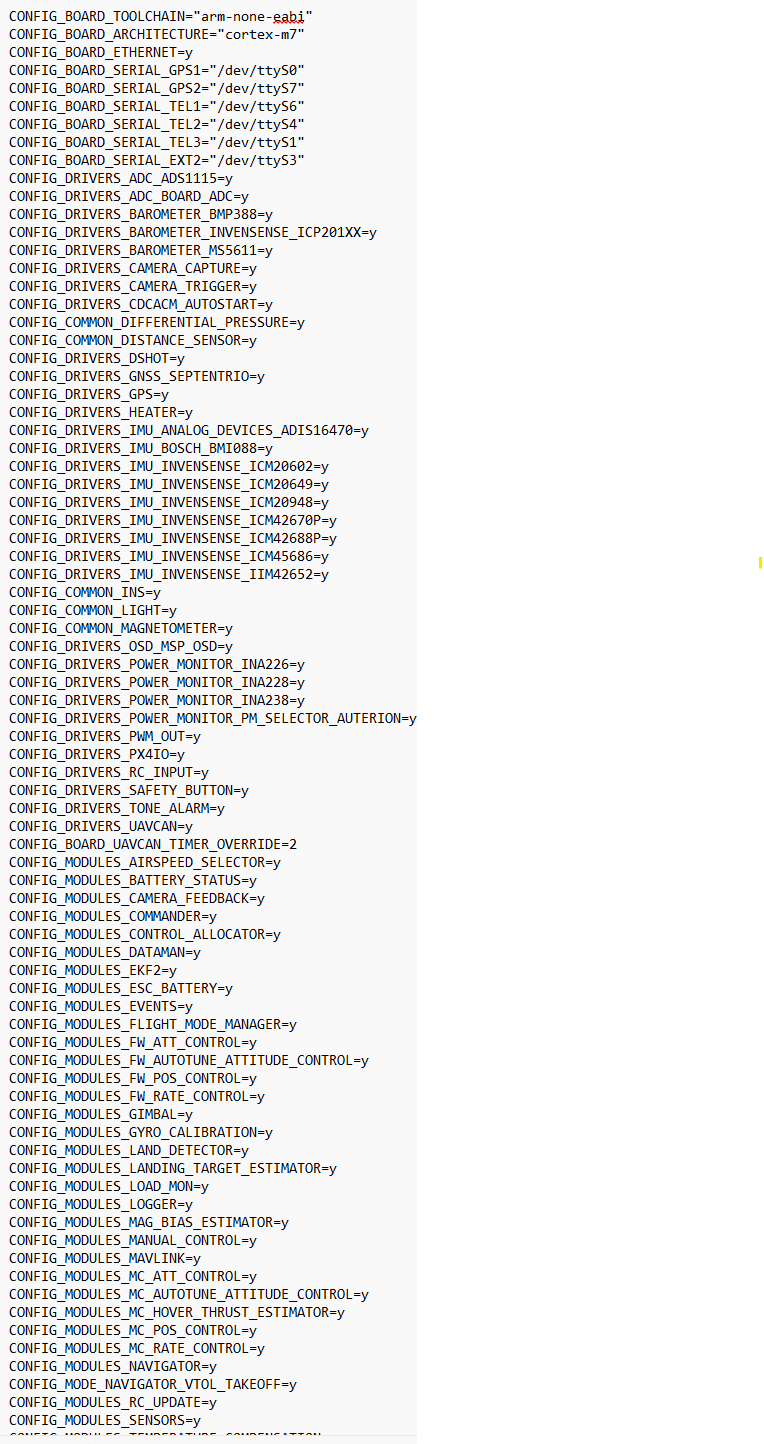
Went down the rabbit hole of firmware, and opened the default.px4board file for my board (fmu-v6x, attached picture), but its not clear to me what entries are needed for each serial port. There is a “CONFIG_BOARD_SERIAL” entry for GPS1/2, TEL1-3 and EXT2 (which I think is UART4?). But only a “CONFIG_DRIVERS” entry for GPS. Do I need config driver entries for the port I intend to use?
Help would be much appreciated!