Hi guys,
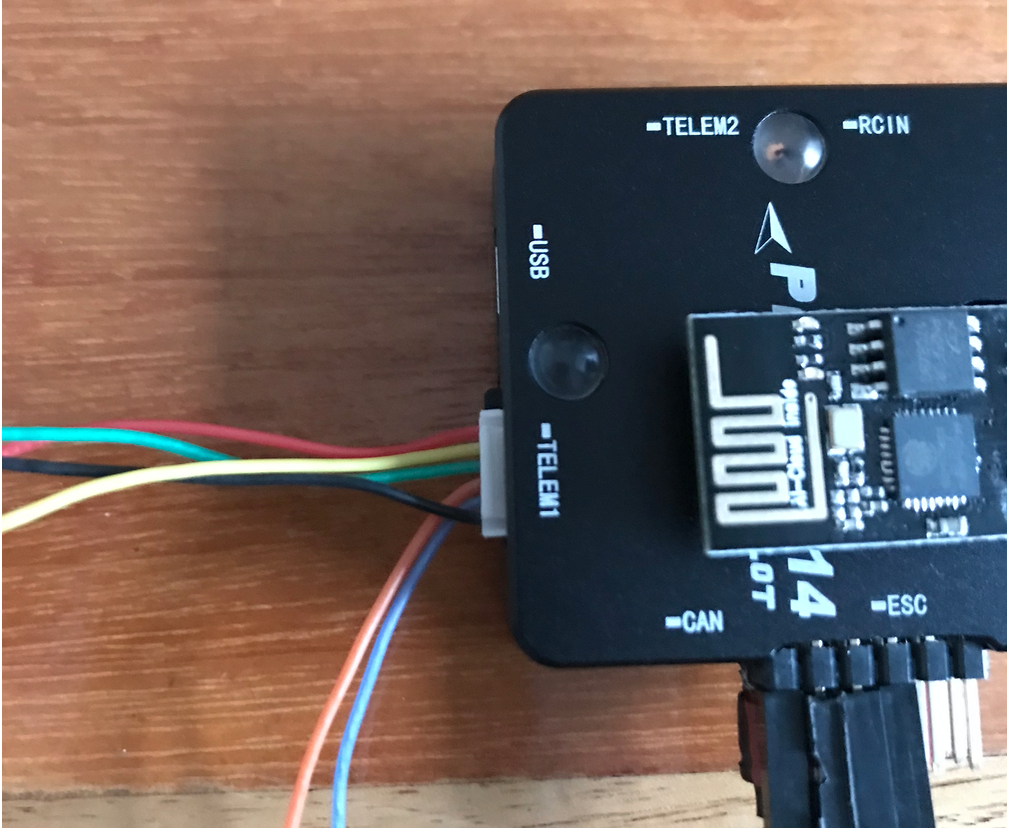
I am just wondering if you can help me to connect the QGroundControl to a Pixracer 1.4 through UART(FPV Radio Telemetry Air Module)
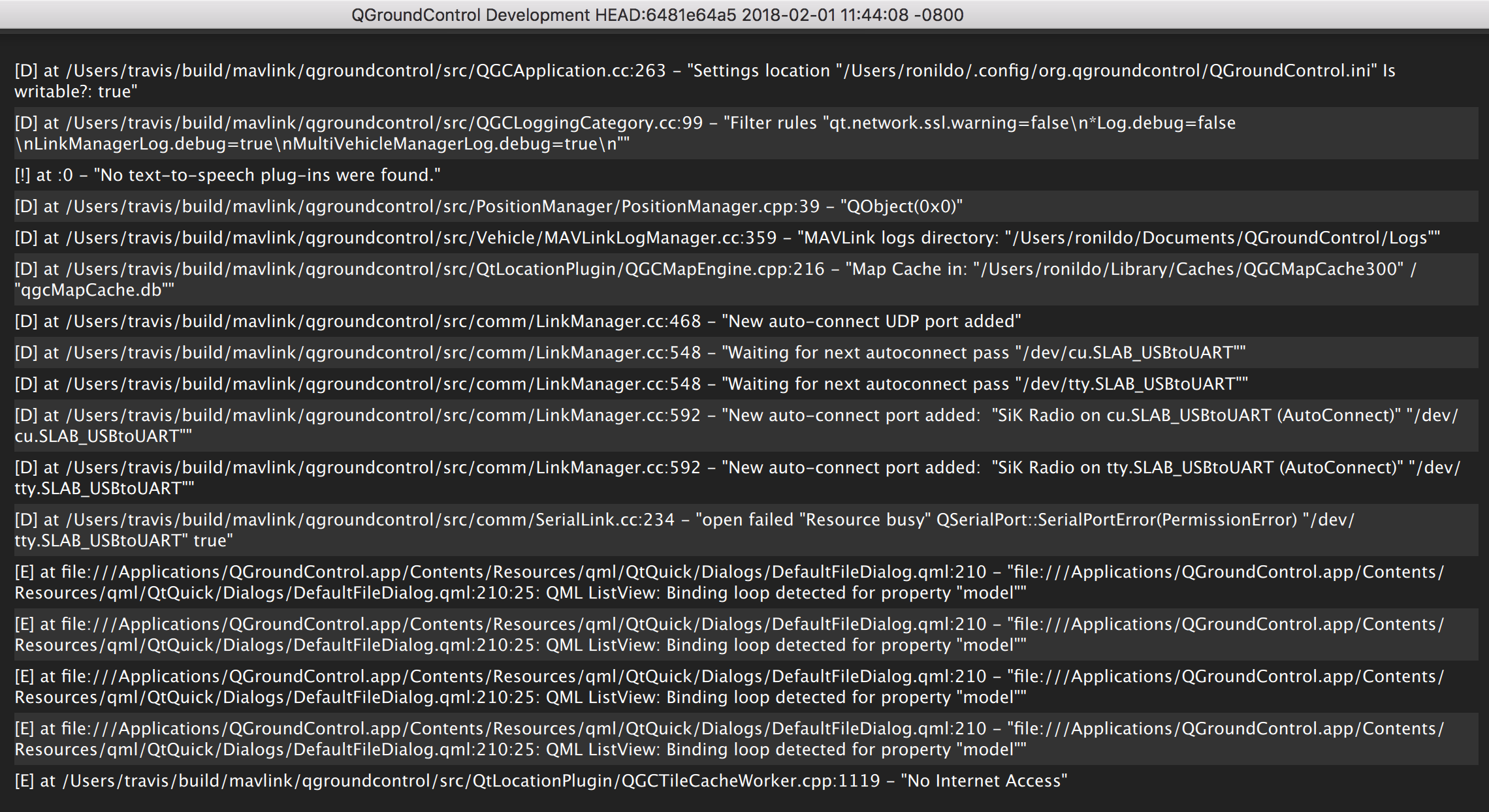
I got the log file already, you can find below and I also attached some images to help explain.
I look forward to hear from you guys.
Thank you in advance.
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/QGCApplication.cc:259 - “Settings location “/Users/ronildo/.config/org.qgroundcontrol/QGroundControl.ini” Is writable?: true”
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/QGCLoggingCategory.cc:99 - “Filter rules “qt.network.ssl.warning=false\n*Log.debug=false\nLinkManagerLog.debug=true\nMultiVehicleManagerLog.debug=true\n””
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/Vehicle/MAVLinkLogManager.cc:359 - “MAVLink logs directory: “/Users/ronildo/Documents/QGroundControl/Logs””
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/QtLocationPlugin/QGCMapEngine.cpp:215 - “Map Cache in: “/Users/ronildo/Library/Caches/QGCMapCache300” / “qgcMapCache.db””
[D] at qrc:///qml/QGroundControl/ScreenTools/ScreenTools.qml:117 - “0.05625”
[D] at qrc:///qml/QGroundControl/FlightDisplay/GuidedActionsController.qml:130 - “_activeVehicle(0) _vehicleArmed(0) guidedModeSupported(0) _vehicleFlying(0) _vehicleInRTLMode(0) pauseVehicleSupported(0) _vehiclePaused(0) _flightMode()”
[D] at qrc:///qml/QGroundControl/FlightDisplay/GuidedActionsController.qml:130 - “_activeVehicle(0) _vehicleArmed(0) guidedModeSupported(0) _vehicleFlying(0) _vehicleInRTLMode(0) pauseVehicleSupported(0) _vehiclePaused(0) _flightMode()”
[D] at qrc:///qml/QGroundControl/Controls/SliderSwitch.qml:74 - “32 45”
[D] at qrc:///qml/QGroundControl/FlightDisplay/GuidedActionsController.qml:130 - “_activeVehicle(0) _vehicleArmed(0) guidedModeSupported(0) _vehicleFlying(0) _vehicleInRTLMode(0) pauseVehicleSupported(0) _vehiclePaused(0) _flightMode()”
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/MAVLinkProtocol.cc:413 - “Orphaned log file count 0”
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/LinkManager.cc:461 - “New auto-connect UDP port added”
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/LinkManager.cc:515 - “Waiting for next autoconnect pass “/dev/cu.SLAB_USBtoUART””
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/LinkManager.cc:515 - “Waiting for next autoconnect pass “/dev/tty.SLAB_USBtoUART””
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/LinkManager.cc:558 - “New auto-connect port added: “SiK Radio on cu.SLAB_USBtoUART (AutoConnect)” “/dev/cu.SLAB_USBtoUART””
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/LinkManager.cc:558 - “New auto-connect port added: “SiK Radio on tty.SLAB_USBtoUART (AutoConnect)” “/dev/tty.SLAB_USBtoUART””
[D] at /Users/travis/build/mavlink/qgroundcontrol/src/comm/SerialLink.cc:212 - “open failed “Resource busy” QSerialPort::SerialPortError(PermissionError) “/dev/tty.SLAB_USBtoUART” true”