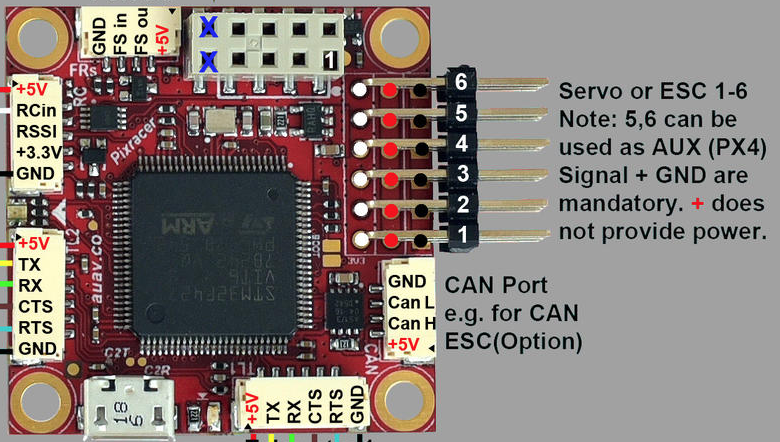
I am wondering if you guys can help me to connect one 4in1 ESC to the Flight Controller(Pixracer1.4). I am concern if I did connect it right because reading through the instruction I found this: Signal and GND are mandatory.
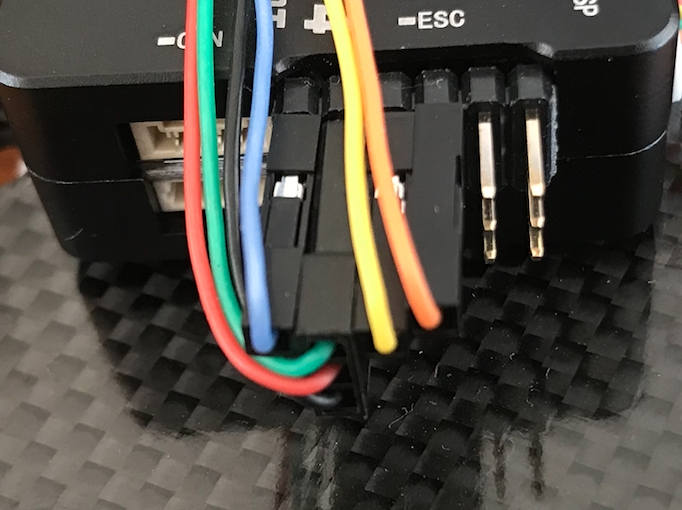
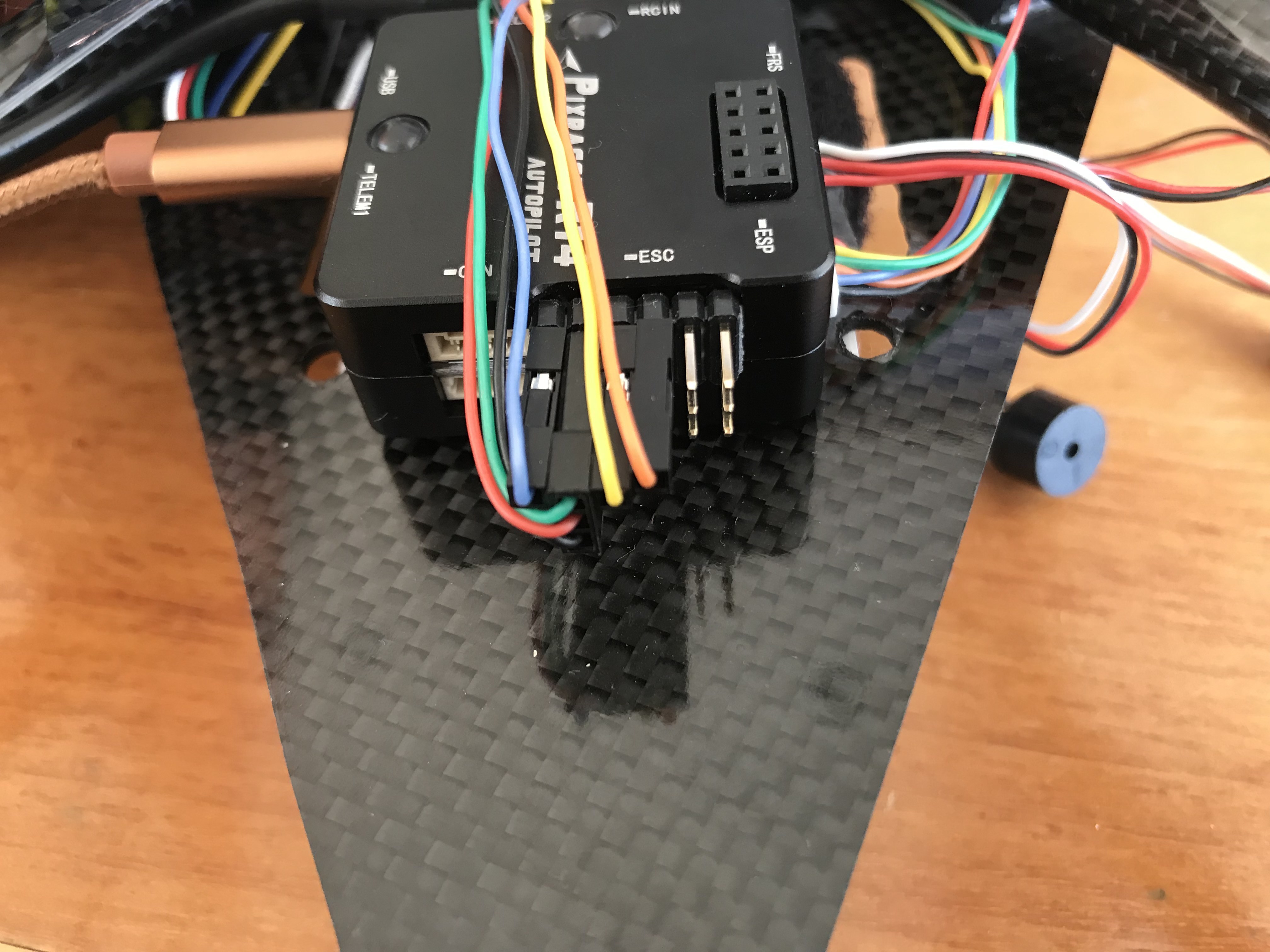
Since my 4in1 ESC has 4 signals, and only 1 ground, I can not really connect the ground into every single channel. I attached some images to help explain.
In another forum, a friend suggest to chain one ground to all/any ground connection although Im not sure.
I am also wondering if it is possible to test the motor direction and see if they are spinning to the right direction and if the communication is working ok though the flight controller and the 4in1 ESC.
I would expect all the ground pins to be shorted together (you can easily verify this with a multimeter). Thus, connecting them yourself or connecting the one ground connection from your ESC will not have any effect. Your setup should be fine.
You can do that with pwm test. Stop the attitude controller first: mc_att_control stop.
Can we please explore a little more this option? I am not sure what is this so I have been reading the documentation from the beginning. I did download the PX4 Source Code, I did my first build (Using the jMAVSim Simulator) and now I just reached the section First App Tutorial (Hello Sky). Honestly I really enjoyed all these things and I hope I can contribute on the weekly dev call with some code, although, at this stage, I am just wondering if I am heading in the right direction because this whole process seems a little a bit overkill, I mean I just want to test the motor direction
I’m not talking about writing your own application. pwm is a utility available in PX4 which you can use through the shell (e.g. through the mavlink shell accessible on the analyze view of QGC).
You can of course also just arm the vehicle and see which direction the motors spin that way.
Yes it does, thank you. I shorted the ground pins together and found out that the vcc do not have to be connected.
I also did run some commands through the Mavlink console and seems to be everything ok now.
I still have a couple of other things to fix such as Telemetry through Wifi and Radio but hopefully I will be able to fix it and put this drone to fly by this weekend