I have been trying to switch my UAV in SITL to offboard mode, but the SITL has not been letting me switch. I am able to takeoff and land, but can’t switch to offboard.
Here is my setup:
Ubuntu 16.04
ROS Kinetic
Gazebo 7.0
IRIS UAV
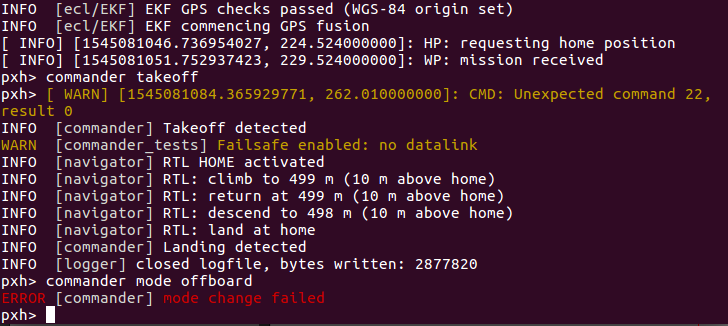
Here is a screen shot of the output when I try to switch to offboard.
If anyone could help me with this that would be great!
@Kevin_Yu What setpoint at what rate are you sending to the drone? You need to send setpoints within timeout to enable off oard mode
@Jaeyoung-Lim Thank you for the help. I don’t believe I’m sending anything yet. I did not know you had to send setpoints to switch to offboard. I believe this topic can be closed for now unless I encounter more problems once I start sending setpoints. Thanks again!