Hello everyone,
I am having difficulty understanding the structure of the TF tree generated by mavros and VIO bridge. I am using Firmware version v1.10.1 and Auterion’s VIO bridge to bridge realsense-ros nodes with mavros node. According to my understanding the tree should be connected as explained in REP:105.
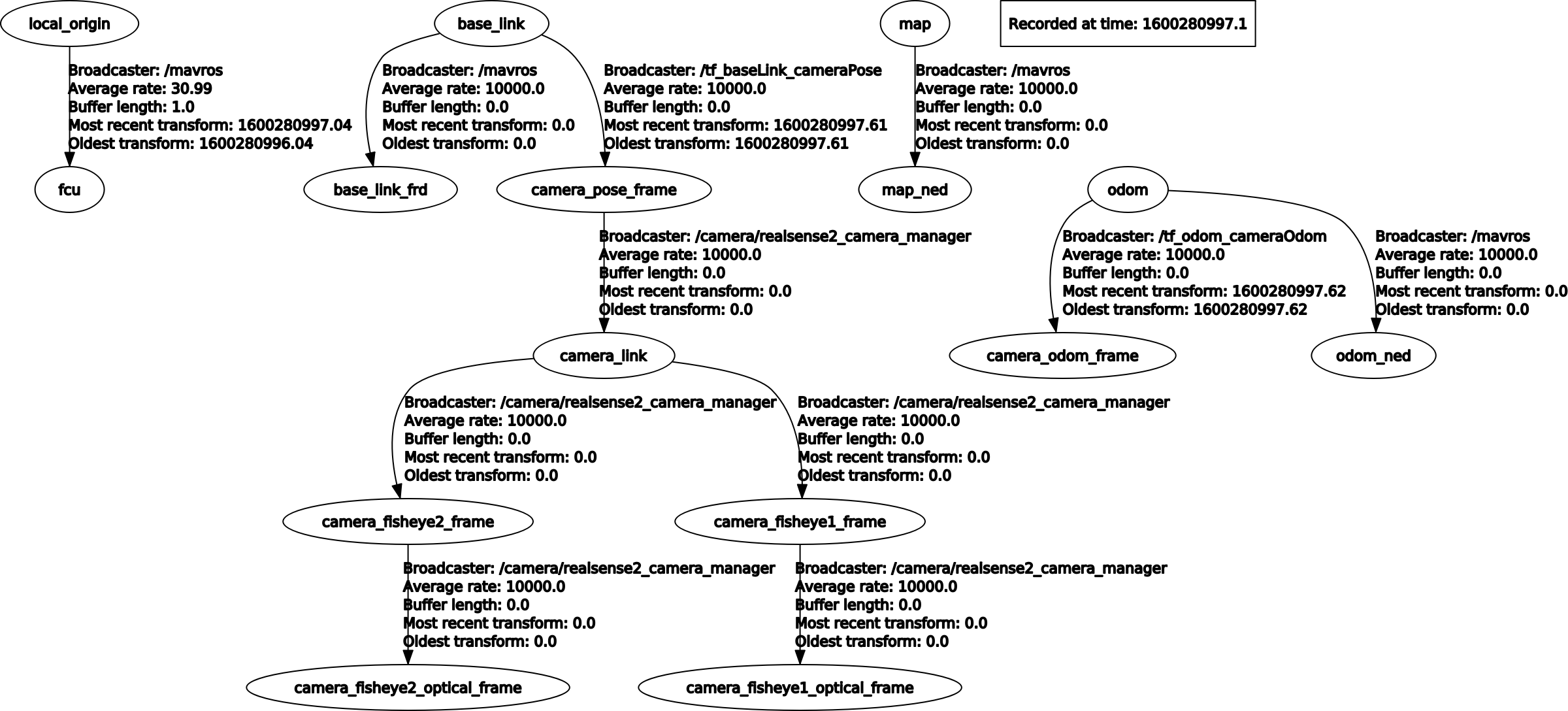
This is how my TF tree looks like:
My questions are -
- As odom and camera_odom_frame are world fixed frame should I connect the base_link frame to camera_odom_frame? If yes how should I do it? Will it be a static transform?
- Should I also connect odom to map directly as static transform?
- What is local_origin and fcu used for?
Thank you,
Rajas
