I would like to use the MAVLINK Protocol to use TELEM2 as my RC input.
Hardware: TBS Nano RX with TBS Mambo.
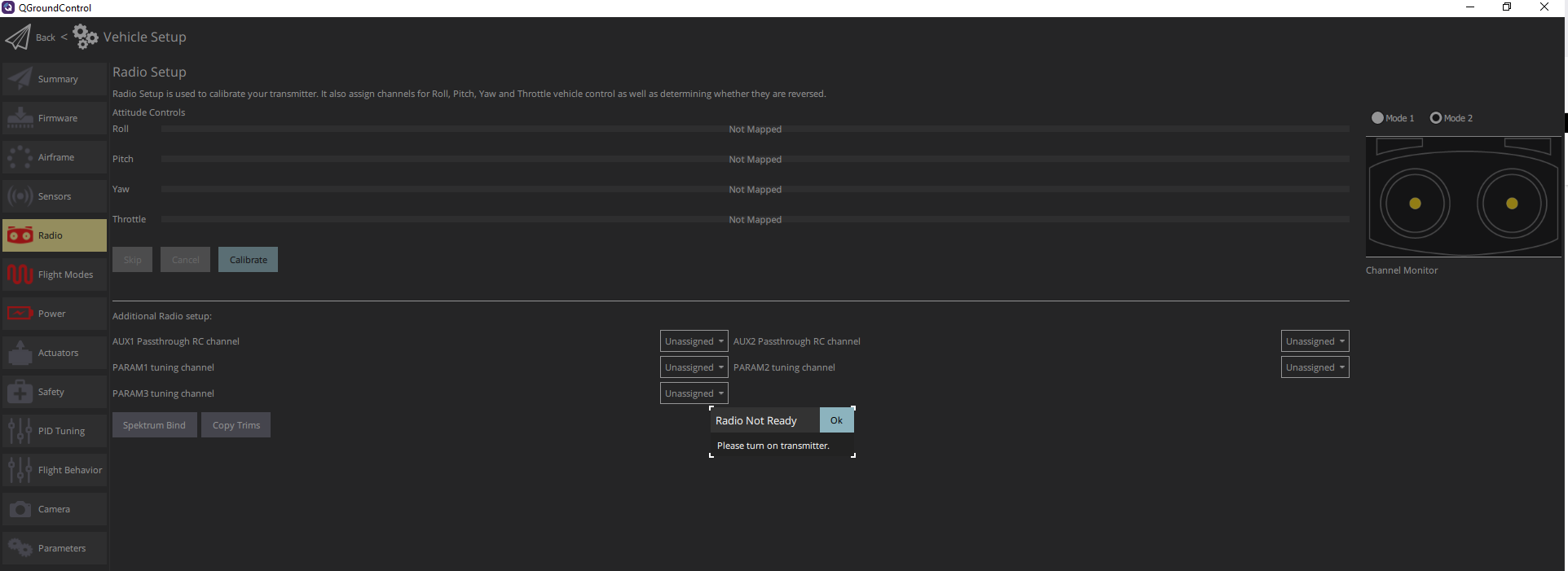
I managed to set it up on ardupilot already, so the wiring and TX setup should be perfectly fine, but no matter what I do in PX4 I get the error message “Radio Not Ready” and “Please turn on transmitter” in the Radio setup tab:
My configuration so far:
MAV_1_CONFIG set to TELEM2
SER_TEL2_BAUD set to 115200
In the Documentation I find the RC_PORT_CONFIG parameter which sounds relevant as well, but I cannot find it in QGroundControl. I am using version 1.14.3.
Why is that? I would appreciate your help.
Okay, I figured out that in order to enable RC_PORT_CONFIG I need to build my own custom firmware and activate a driver, so I can modify the parameter.
The problem remains however. Has anybody ever set up MAVLINK as RC Protocol?
What parameters do you use?
Good question, I would also like to know.
Similar to you I have MAVLINK-RC working but with ELRS, need to switch to PX4, I have a 6C-mini I’m testing with.
I get bi-directional comms and RC with Ardupilot - would want the same in PX4.
I was just looking for the same since my Orange+ doesn’t really have a spare uart for CRSF and Mavlink. No luck so far. It isn’t clear what module needs to be used for the RC control portion. In theory it may be the case that your RC radio appears to be a collection of joysticks and switches.
请问你解决了这个问题吗?我目前也遇到了这个问题,当我把elrs接收机和遥控器设置为mavlink协议后PX4无法识别到RC的输入。
May I ask if you’ve solved this problem? I’m currently facing the same issue. After I set the ELRS receiver and the remote control to the MAVLink protocol, PX4 fails to recognize the RC input.