I try to control my drone from mavros on companion computer by sending ‘/mavros/setpoint_raw/attitude’ message.
My goal is to control drone without providing any position source to it (no GPS, no any visual odometry).
I start my node which sends attitude setpoints on 150 Hz, then switch to OFFBOARD, then arm a vehicle - but it triggers failsafe with the following message: “[mc_pos_control] Offboard activation failed with error: Activation Failed”
For some reason I use pretty old firmware - v1.10.0.
I searched a littlle and I have a doubt - is it possible use offboard without position source at all?
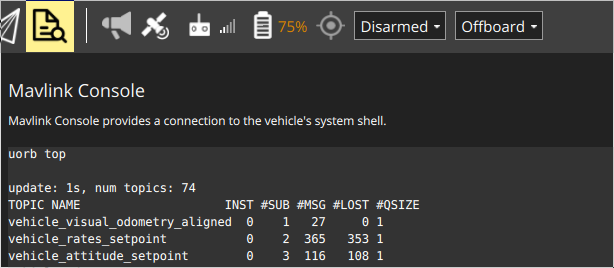
It is possible, you need to figure out why entering offboard was rejected. Have you confirmed that the setpoints are actually reaching the flight controller?