I was flying with my multicopter in Mission mode. I created a flight pattern with 4 similar loops at different speeds (5/10/15/20m/s). During the final loop at 20m/s suddenly the drone went off-track, an abrupt manoeuvre turning right, while it should have gone straight to the waypoint. I engaged immediately the RC to land in position mode. Here is the link to the PX4 flight review: https://logs.px4.io/plot_app?log=65142143-04d3-489a-8ae4-e956d9c516b2
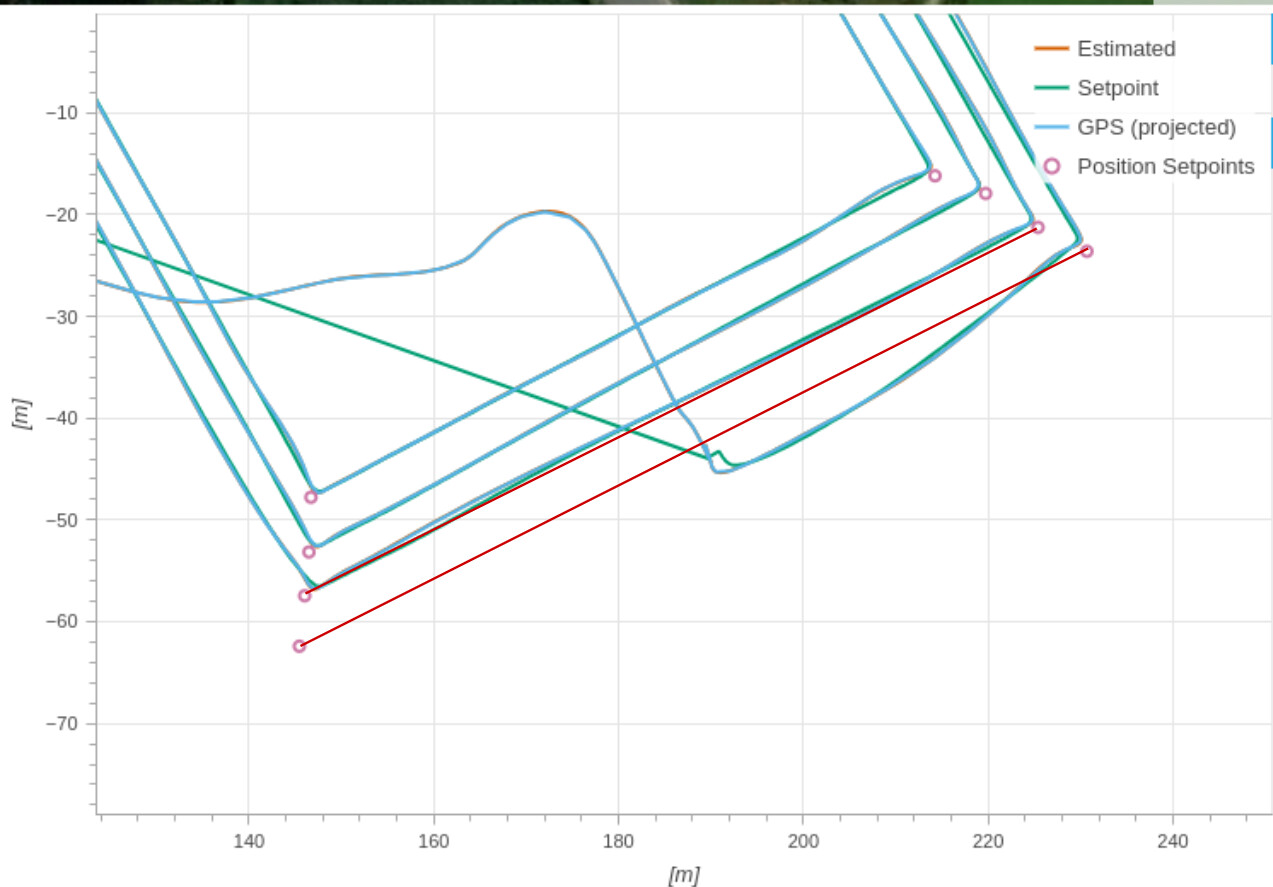
I verified the log file but I do not understand why suddenly the multicopter goes of track. It seems that the PX4 software calculates new setpoints and the multicopter tries to follow it. Any idea why the setpoint calculation was wrong? Or is there another explanation?
The final waypoints, the one that where not executed, are not shown at the plot above altitude estimation. I believe this is the normal logging procedure?
For some reason the trajectory generator did guide the drone too far off track. The “flight task” then entered the offtrack state and wanted to bring the drone back to the line connecting the two waypoints.
Thank you for looking in to this topic! At the moment I fly with Firmware v1.14.3.
The terrain where I flow is flat, it is a farmer field without crops (winter time).
The area where were I flow gives lot’s of errors wrt C2C data link loss because we fly with a 4G connection and the aerial coverage is bad. We upload from the GCS, over the 4G network, the information for the RTK correction. Before the flights I was wondering how that would go with a bad C2C connectivity, switching between receiving RTK corrections and not. Might this be related why the trajectory generator brought the drone offtrack? If I look at the GPS uncertainty plot that does not show much difference at the time the issue appears.
At the distance sensor plot there is a spike around 10m14s wich seems to result in ‘dist bottom valid’=1. Might this be related to the 2D to 3D fix?
From which firmware is this 2D-3D fix integrated?