PX4 Sync / Q&A: Feb 05, 2025Dronecode Calendar
Announcements
Future Events
Flight Testing Update
Release Discussion
Bug Report / Q&A
New ARK Flow MR is out:
We are running a beta program with Ascend Engineering (Chicago). They will be running flight testing for the community as part of an arrangement with Dronecode
How to reach out to the team
GitHub: Tag user @PX4 /testflights
Discord: #flight-testing
Weekly on the PX4 Dev Call
How to Request Testing (GitHub)
Write down the steps to test your issue/pull request
Make sure to note the risk involved in flying
Write down things to look out for / anticipate - eg: “we are looking for no yaw jumps”
Add issue/pull request to the Flight Testing project board
Make sure to specify any hardware/software requirements as much as possible
Flight Testing board:
Project Board
For release coordination, we will be using the project board.Project Board Link
v1.16 Release
Discussion
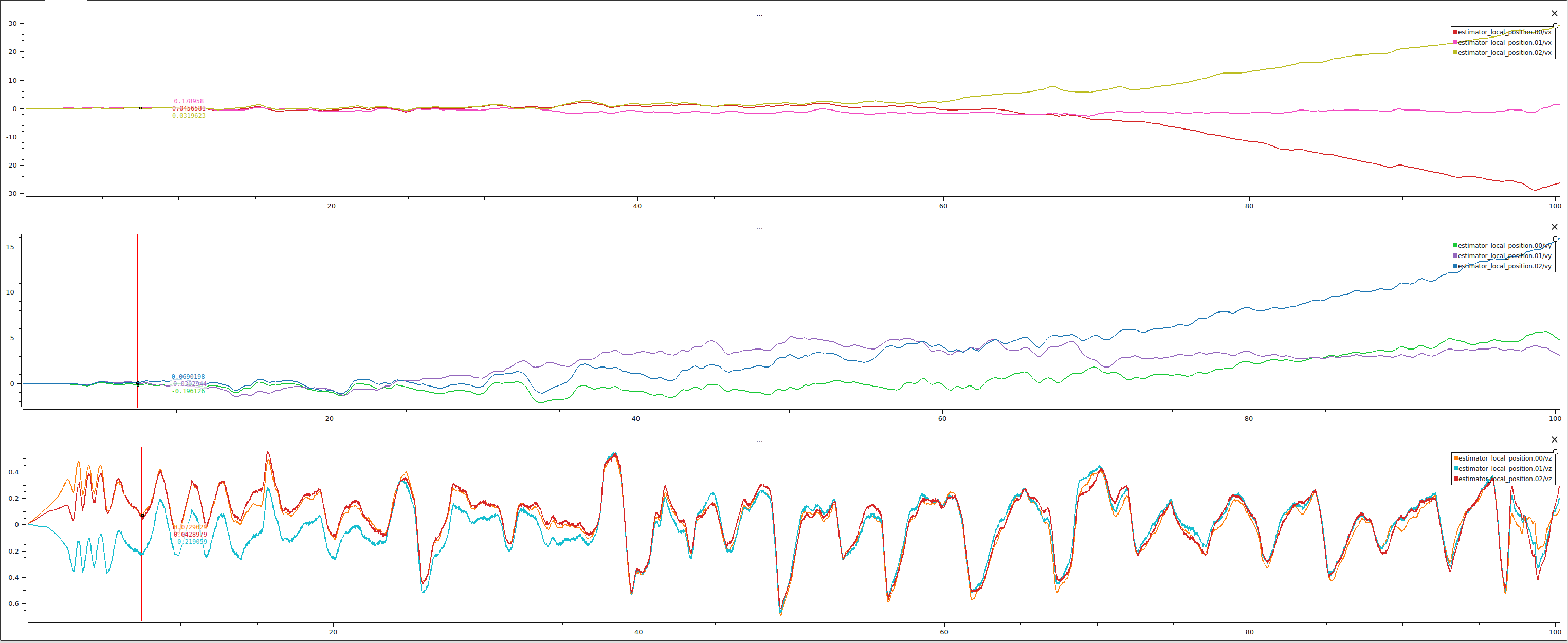
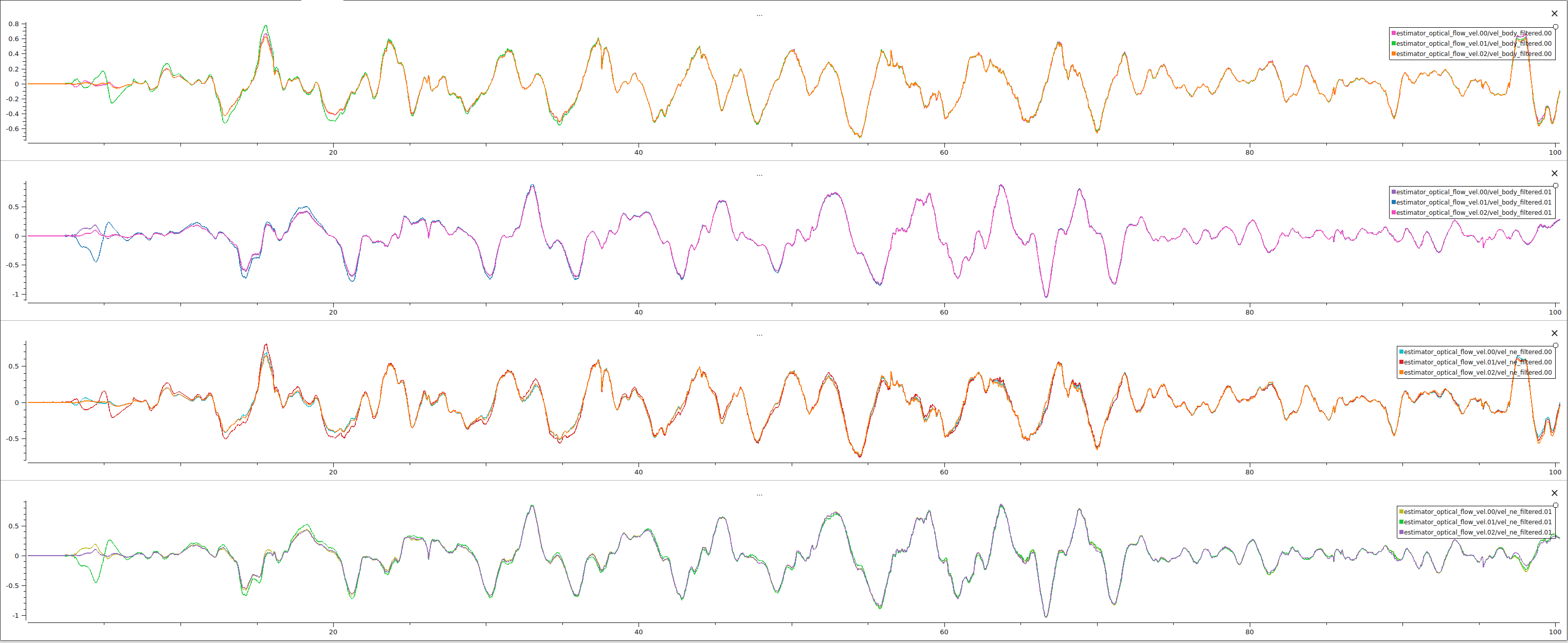
1- [Bug] Multi EKF vehicle local positions starting with large offset on quad indoors · Issue #24206 · PX4/PX4-Autopilot · GitHub
2- @Teddy_Zaremba Running into an issue in 1.16 alpha where EKF2 isn’t fusing vision data. Does anyone know if something changed between 1.15.3 and 1.16 alpha with how external vision gets fused? http://flight-review.modalai.com/plot_app?log=039356e2-3ed3-4356-b315-5b43f6aec4e0
The log before and after is better to be provided.
3- @AWilkins_Ascend Hold mode without GPS fusion: How different 1.15 and 1.16 are interacting with the Hold mode without a global position.
The tests are going to be done by the flight test team first in SITL and hardware to figure out how the navigator is handling the situation.
4 - [Bug] Failed to get DroneCAN (UAVCAN) parameters list · Issue #24268 · PX4/PX4-Autopilot · GitHub
main ← pr-spacecraft-allocator-and-board
opened 09:24AM - 16 Jan 25 UTC
### Solved Problem
Provides support for spacecraft-like vehicles available in h… ttps://github.com/DISCOWER/PX4-Space-Systems . This PR introduces spacecraft board for SITL, as well as a barebones allocator for preliminary spacecraft build targets.
### Solution
- Add spacecraft SITL board
- Add barebones spacecraft control allocator
### Changelog Entry
For release notes:
```
Feature/Bugfix: Support for spacecraft vehicles
New parameter:
Documentation:
```
### Test coverage
- Simulation/hardware testing: more info here http://atmos.discower.io/
rroche
February 4, 2025, 8:24am
2
Team I won’t be able to join you this week again. Please ping me if there are any action items for me.
Could we have a discussion on our issue we talked about 3 weeks ago, regarding the indoor flights without gps?
opened 08:58PM - 13 Jan 25 UTC
bug-report
### Describe the bug
I’ve been facing significant issues with quads using opt… ical flow for localization indoors(no GPS and EKF2_HGT_REF=RANGE). The estimators have a large offset from each other(20-500 m), if the estimator switches the drones tries to compensate. It happens occasionally.
### To Reproduce
Fly indoors with no GPS and EKF2_HGT_REF=RANGE in the latest main in position/offboard.
### Expected behavior
If the estimator switches the drone should should stay where it is since the estimates should align.
### Screenshot / Media


### Flight Log
https://review.px4.io/plot_app?log=6c072e4a-e0aa-4a46-9833-78db51355d37
https://review.px4.io/plot_app?log=6e490f75-ed41-477a-9d91-771896215a7d
### Software Version
Main
### Flight controller
ARKV6X Flight Controller
### Vehicle type
Multicopter
### How are the different components wired up (including port information)
_No response_
### Additional context
I am also having issues with dist_bottom_valid behaving weirdly and invoking fail safe even though the drone seemed fine otherwise.