Dronecode
PX4
QGroundControl
QGC
MAVSDK
MAVLink
Documentation
Docs
Support
Help
Discussion Forum for PX4, Pixhawk, QGroundControl, MAVSDK, MAVLink
Set Stabilize flags to false
Cujo
February 18, 2021, 6:12pm
1
image
966×382 20.1 KB
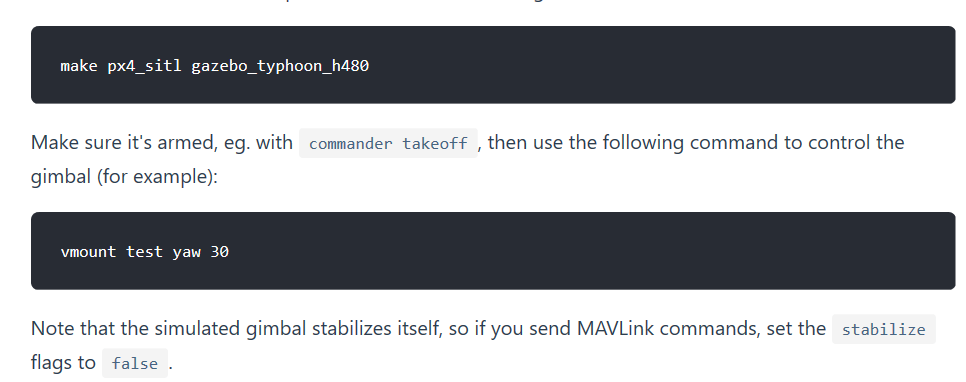
In the gimbal control page, it says " Note that the simulated gimbal stabilizes itself, so if you send MAVLink commands, set the
stabilize
flags to
false
." Does anyone know how to do this?
Related topics
Topic
Replies
Views
Activity
Setting Stabilize flags to false
PX4 Autopilot
2
465
February 8, 2022
How to disable failsafe for Gazebo simulation?
1
796
August 9, 2021
Camera Gimbal Stabilization on Pixhawk
1
756
August 16, 2018
Velocity Control - without Mavlink
0
443
December 11, 2017
Gimbal MAVLink Error
MAVSDK
1
621
April 26, 2019