Hi all,
I am using an existing Reaper_500 airframe as the initialisation file within QGC. I was able to publish actuator control message through to mavros node. The group_mix number is set as 0. 
I was able to load a passthrough mixer within QGC using the mavlink console with the following code:
mixer load /dev/pwm_output0 /etc/mixers/FMU_pass.mix
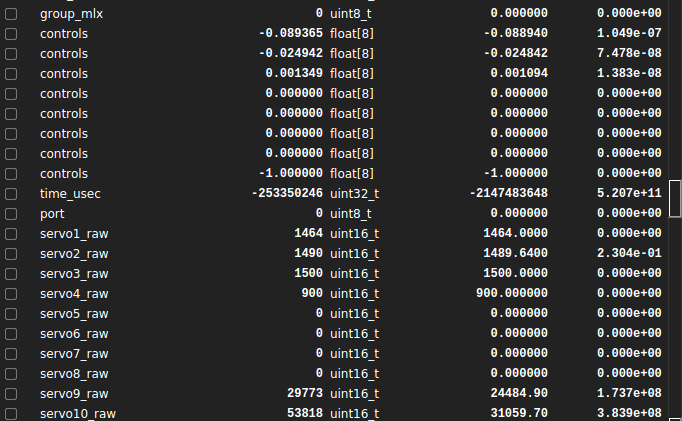
which is supposed to map my actuator control input into PWM signal and be monitored by the servo output raw analyzer within QGC. Though after loading the mixer, I can see the first 4 servo channels displayed a change. However when I published my control messages, the numbers did not change on the screen.
Can someone point me in the right direction? How can I map the actuator control messages to display in servo out raw?