It’s an open-source drone light show software (currently only supports ArduPilot for Autopilot stack) including planning, visualization, control, and ground control station. It’s fantastic!
Why do we want this? Because Ardupilot has it! (we are very similar), and it would be the first-ever drone light show solution that any PX4 users could use for drone light shows
What is needed?
Implement Skybrush compatibility into PX4-Autopilot.
Basically, it would be implementing the Skybrush functionality commit in Ardupilot to PX4-Autopilot. Here’s an example of a commit:
Or a complete diff (showing every changes) for Copter 4.3 can be found here:
Expected workload
I would expect this to take roughly 20 hours to complete. Meaning it would take around a month for an individual to finish this!
Good news is that already the Skybrush developer is interested in helping out with resources:
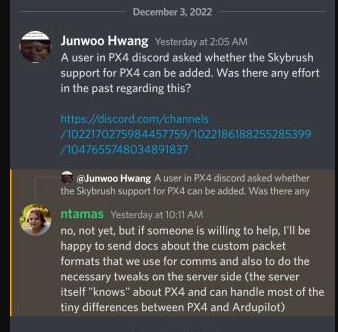
This was originally brought up here, then Skybrush developer showed interest in providing the documentation & custom packet for helping in this integration effort.
Skybrush lead dev here and I can confirm that I’m happy to help. I’ll get back later to this thread when I’ve gathered my thoughts about what constitutes the “public API” of an ArduPilot + Skybrush based drone that a PX4 + Skybrush drone would need to replicate in order to make our GCS support both.
Edit: I’ve started gathering my thoughts in an informal manner on the Skybrush Discord server here. In general, I’d prefer the Skybrush Discord server for communication as I already have too many communication channels to watch and I cannot guarantee that I won’t miss messages here. I turned on the notifications for this thread, though.
Will be happy to help you out for testing and adding skybrush support to PX4, we have got a large fleet of drones to test and verify your work since we are into drone show business as well
Hey, thanks for providing testing capability! It will be very useful once we have it at testable state
However, as the implementation needs to happen first, I would like to ask if there is any room in your company’s development resource to make this happen.
That would be really ideal as you have testing capability as well, which will accelerate development process faster.
No one in my company has ever run PX4 firmware since ages on any kind of drone, I’m too not very familiar with the PX4 codebase, structure and components, not even explored and tested skybrush with ardupilot much, so I’m not someone who can get started on it at this moment, that’s why, I will prefer to support and help @ntamas to test and verify his approach for adding support for skybrush to PX4