Dear all,
I finally decided to assemble my first drone and I have just come back from the first test flight. I am writing because I noticed a scary behavior (mostly the drone drifting around, sometimes moving so fast towards me) and, since I am completely new to log analysis, I would like to have some experts opinion about the recorded flight log.
I am flying with a DJI F450 Frame kit (https://www.dji.com/flame-wheel-arf) using the kit’s motors, ESCs and props.
The flight controller is an “mRo Pixhawk 2.4.6 Cool Kit!” (version 1.8.0) mounted on its “Damping Foams”. I used the F450 as Airframe in the QGroundControl configuration page, I have already calibrated the ESCs, the RC and the sensors.
I noticed that, after takeoff, in Stabilized mode, the drone is quite stable; but when I start flying a little faster, it starts drifting, even in Position mode, even if I leave both the sticks centered. The Land mode too didn’t work properly: it was descending vertically but suddenly it started going forward. It seems that the Stabilized mode is the best for now.
I am attaching the flight log, I am sorry if it doesn’t follows the forum guidelines… I will try to do another test soon.
But in the meantime I would really appreciate if you could give me your opinion about the graphs. They seem really messy to me… https://logs.px4.io/plot_app?log=b4bf4f04-6dd1-42bd-82ed-f2ee582233eb
No need to do ESC Calibration with Stock E-300 Set from DJI, as DJI ESC can not be calibrated.
The FlightController lost GPS lock at around 6:15 in the Flight. Check GPS Connection
You Compass is influenced by the motor Current. How/where did you mount the GPS Puck. Try moving it further away.
Regarding Landing. 1. you switched to Land Mode @07:44 then to Return To Land @07.45 which is kind of strange as the vehicle should already being landing. Then @07:59 you switched to some undefined Flight Mode, this is when your Vehicle started moving Forward, just to switch to Stabilized at around 08:00.
I have a F-450 with Stock E300 flying not too bad with Stock Values. Maybe lower the X & Y Gains in MP Section.
Dear Andreas,
thank you so much for your reply. I am moving my first steps in drone building and I really appreciate your help.
I will add some details about the points you highlighted:
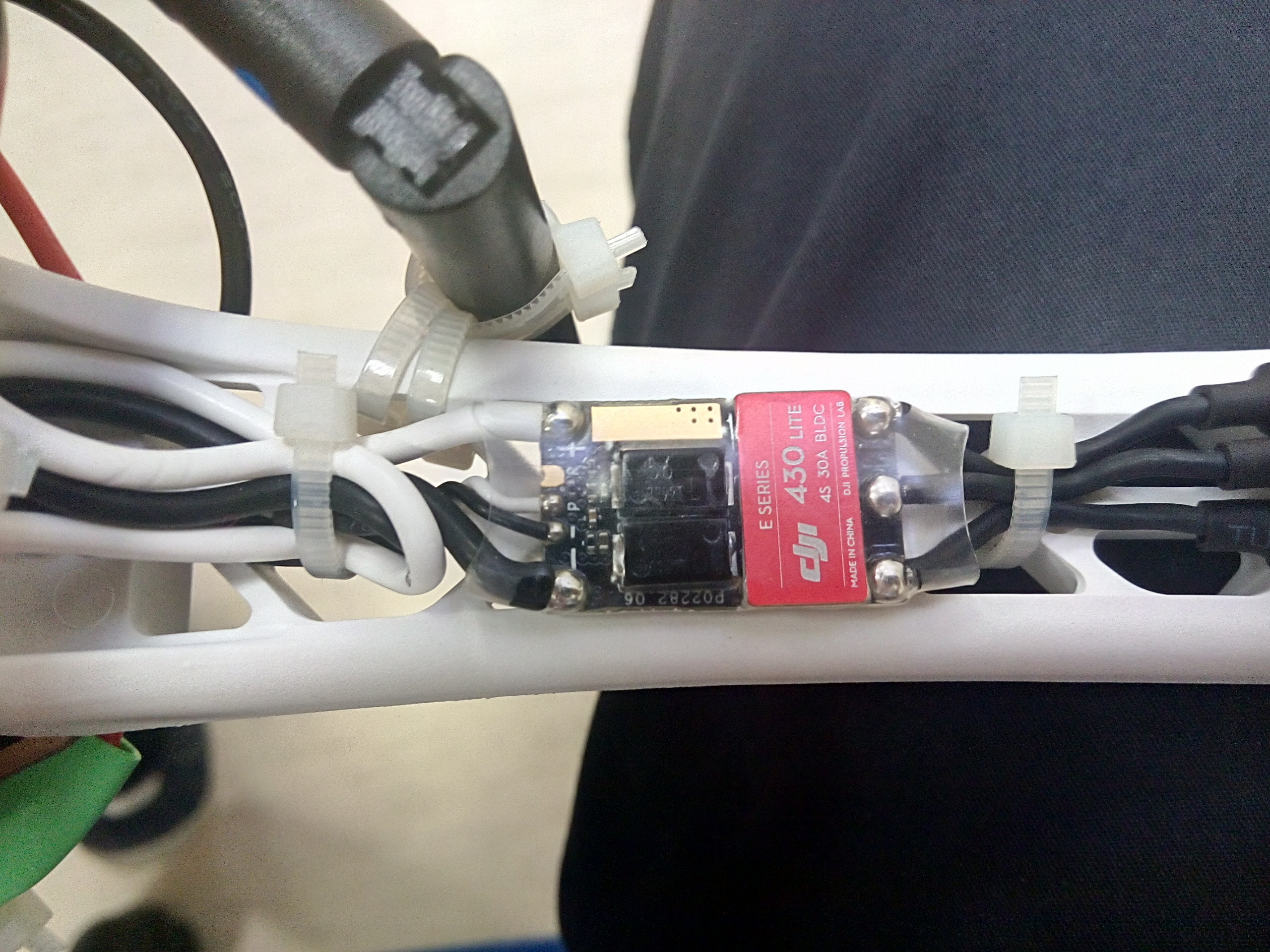
I noticed that the ESC controllers are not the one that DJI shows in their video tutorials. I am attaching a photo… anyways it’s better if they don’t need to be calibrated, too;
I checked the GPS connection. They seem to be fine, both the pixhawk and the cables are brand new. Actually it would be really hard to disconnect them. I can’t find the GPS loss information in the log. Could you please tell me where I can find it? In the “GPS Uncertainty” plot, the “GPS Fix” line is always =2;
I mounted the GPS Puck on the “DJI A2 GPS Bracket” (http://www.helipal.com/dji-a2-gps-bracket.html). I used the medium-length stick (see attached photo). Actually the magnetometer caused me quite a headache even before the first flight.
I am using this board: https://store.mrobotics.io/mRo-GPS-u-Blox-Neo-M8N-HMC5983-Compass-p/mro-gps003-mr.htm. It has both the LIS3MDL and IST8310 compasses to provide redundancy but in the Current compatibility section it says that PX4 supports LIS3MDL only. At first, in the Sensor window on the Summary page I could see 3 Compasses (namely 0, 1 and 2) but I could never pass the compass calibration. It always returned magnetic calibration inconsistency. So, in order to pass the calibration procedure, I had to set the CAL_MAG0_EN to “Disabled” but actually I don’t know which magnetometer is which. I am afraid that I could have messed this configuration. Is there a way to identify the magnetometers (I mean, which one is the internal?);
Regarding Landing, the RTL mode is in the switch’s middle position between Land and Stabilized. I think I have to change the Flight Modes configuration. Anyway, I can’t understand how it can have switched to an unknown state…
Thank you again for your help, I am attaching a couple of pictures of the drone and the ESC.
Hi elBarto,
As far as I know in Pixhawk, if there is external magnetometer, it has higher priority than internal one. So mag0 in your case should be the external one.
It is normally better to rely on external magnetometer so you may disable mag1 instead and see how it works.
Hi Kyuhyong_You,
Thank you! Doing some single-sensor tests and looking on the bottom of the mRo GPS board, I found that the gyro sensor is not oriented as the arrow that is printed on the board’s top side. It has a 90 degree rotation on the yaw axis.
So, I applied the rotation in the QGroundControl setting an now the calibration returns successfully using both the sensors.
I will go for a flight test soon and I’ll let you know…
I did it! Now it flies so much better.
The problem was caused by the (wrong) external compass orientation.
mRo GPS board has the gyro sensors that are rotated (YAW_90) from the main arrow orientation.
I just had to change the orientation parameter and all the problems went away.
Now the logs are like the following one: https://logs.px4.io/plot_app?log=14b2321d-c8dd-424b-aadb-581a58320be6.
Glad to know you can fly the drone.
It is bit wired tho, because if the orientation is wrong, qgc would have warn you “mag0 inconsistent” error.
Anyway, it is always good practice to check any warnings or mis-alignments before start flying.
It did… so I disabled one of the two compasses (the external one, bad idea ). I really could not imagine that the arrow orientation was not the compass orientation.
Now I am using both of them (with the proper rotation) and the external compass is set as primary.
The Arrow is a fusion from Compass & Gyro (eventually also GPS while moving). Usually if you have unmatched Compass orientation, the Arrow would wander around - at least it should not point to the north.
There should be no Gyro on the Compass Board AFAIK - at least I have never seen it, and I think it would be useless since the GPS is not always mounted very rigid to the Frame. Logs look much better now! Good luck.

 ). I really could not imagine that the arrow orientation was not the compass orientation.
). I really could not imagine that the arrow orientation was not the compass orientation.