Thanks for writing back with some ideas. Sorry for taking so long to respond to your help, but finally circling around to this project again.
I inherited this quad and the controller is in a plastic case (white) between the f450 frame layers and would require substantial disassembly to figure out the exact board (unless there is a way I can query from QGC?) I’m trying to reach the original builder to see if they recall the specific hardware details. Again, I’m a super newbie with px4.
I can verify the gps is a 3dr gps/compass – a bit dated based on the older style (pre JST-GH) connector, however the original builder used a cable with only 4 wires so the i2c lines are not there. It sounds like I need to source the correct cable: 6-pin JST-GH on one end and picoblade (or whatever the old style was called) on the other end. I think we may have these back in our lab, but I’ve been working from my basement since last March … ugh.
I found the mavlink console in QGC – wow, that’s a cool feature to have available. I verified I only have the onboard/internal mags — reporting zero error counts at the moment.
Can I ask a naive question? I don’t understand why the mag issue only peaks when I activate a position hold or mission mode. Prior to that it bumps around, but there are no specific warnings or errors. I walked around for 5 minutes holding the copter in different attitudes to see if that would help the EKF converge. It was ok, it reported reasonable heading (I mean +/- 20-30 degrees on the ground before flying … dji doesn’t do much better than that on a lot of days.)
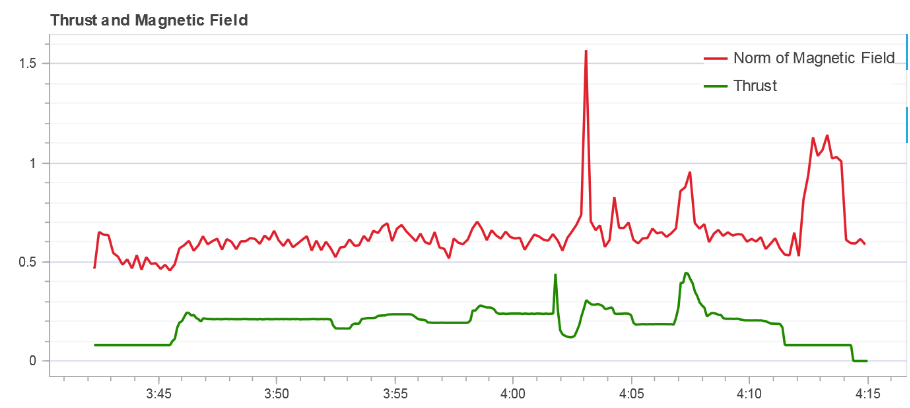
I can take off and fly manually in stabilize mode all day long without any warnings or issues. But when I flip the switch into mission mode, I see these mag error spikes, the ekf2 blows up, and the copter scampers across the field in a random direction. So I’m already in flight (presumably with representative mag interference and flying just fine … but it’s not until I flip into mission mode when we see the big interference spikes in the data.)
This is me guessing: it seems like the EKF runs in some sort of reduced (AHRS?) mode when I’m flyiing in stabilize or walking around on the ground, and it doesn’t really kick into serious GPS/INS mode until I activate a mission or position hold mode? But at that point (when I’m already in flight) it immediate barfs and the copter zips across the field in a random direction until I take back manual control. Am I guessing about right as to what is going on with internal ekf mode switching based on flight modes???
For whatever it’s worth, where I’m going with all of this … our lab bought a big pre-built hexacopter with px4. I was really really hoping to get some good px4 experience with this smaller f450 before putting a couple grand in the air and doing something stupid with it. That was my thought process.
So ideally I could find a way to get this f450 flying practice missions and routes, and ideally I’d learn something and accumulate a bit of practical px4 experience. and maybe come to a better understanding of what’s actually happening under the hood … that is what I’m hoping to accomplish here … don’t know if it’s possible though. I’ve been building my own flight controlles for too long, so probably overly biases towards my own way of thinking about things … but trying to learn!
Best regards,
Curt.