I have built a rover with a Pixhawk 6c Mini. Flashed it with PX4 Autopilot, configured all sensors, the radio and the servos. Have tried the Manual Mode via RC and the rover drives perfectly.
Now the issue:
I have created a Mission in QGC and uploaded it to the controller via USB. Then I unglugged the USB-cable and switched on the Mission Mode via RC but the rover doesn’t start moving…
I am grateful for any help!
Some additional information:
Hardware: NXP-Buggy3-Kit with Pixhawk 6c Mini
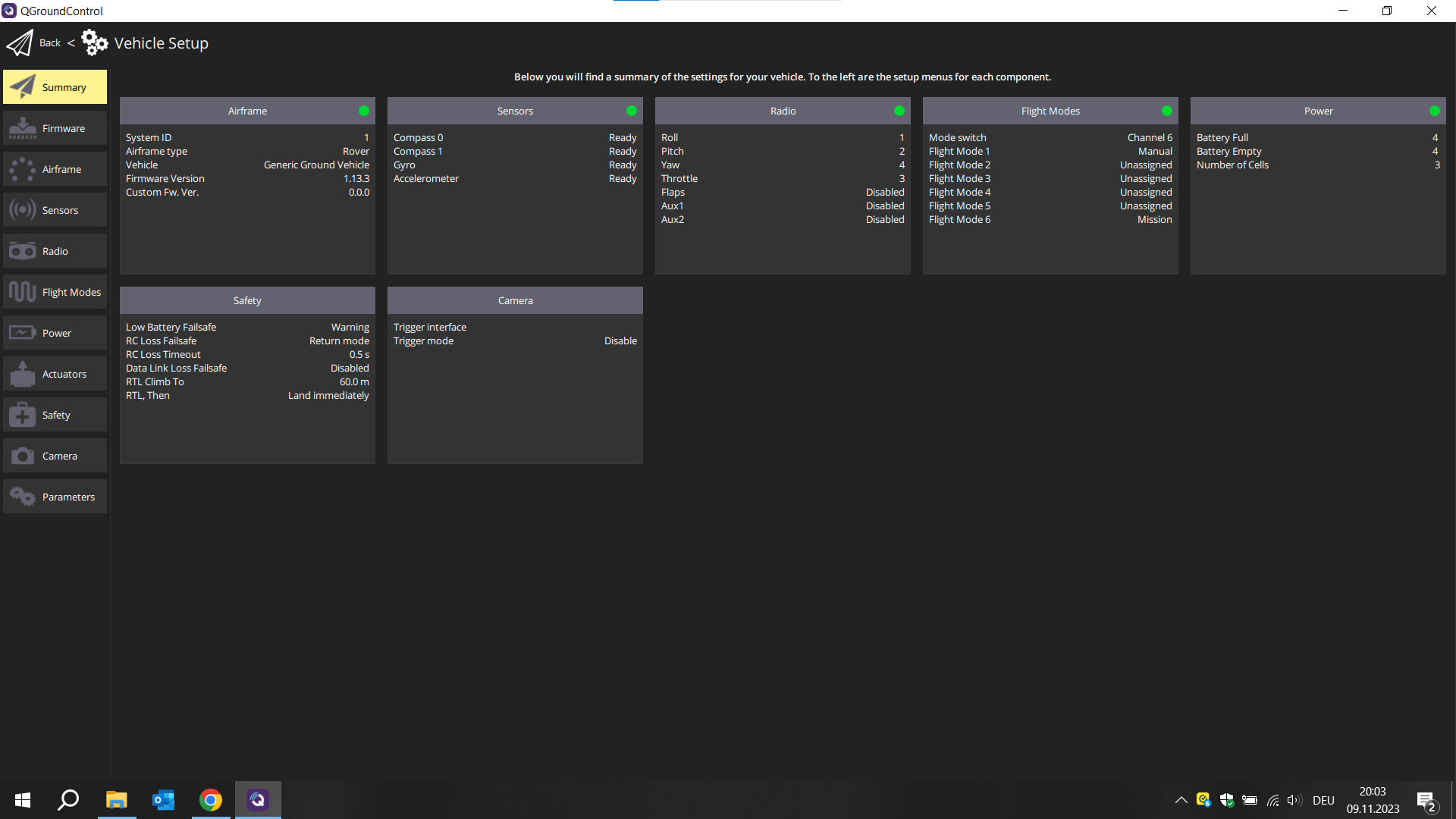
Firmware: PX4 1.13.3
Airframe: Rover
Vehicle: Generic Ground Vehicle
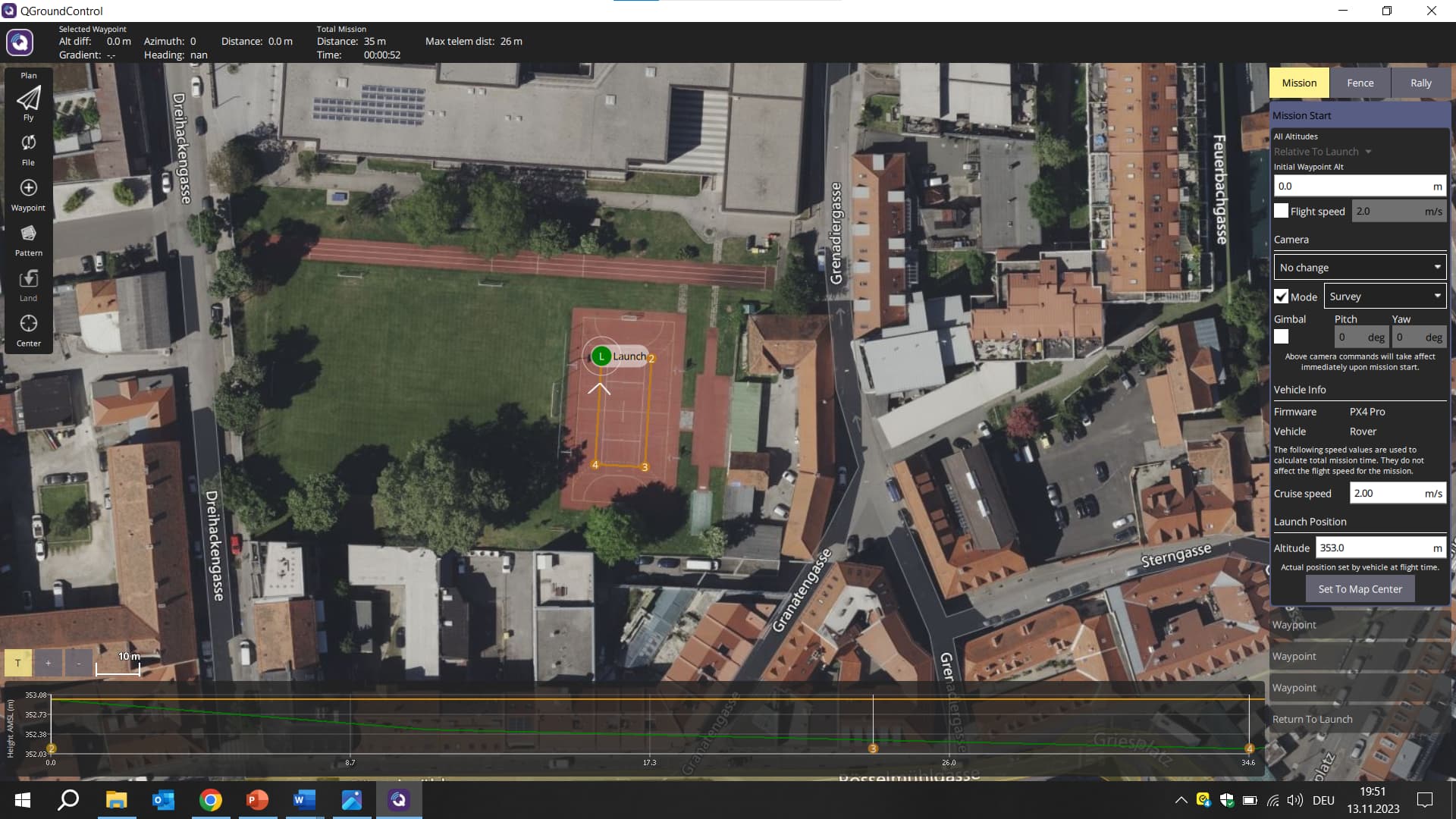
The Mission has a starting point, some waypoints and RTL.
Initial Waypoint Altitude is 0.0
Pictures of the rover and some screenshots are added on
Unfortunately, I don’t have a telemetry module. I tried it with a MAVLINK Wifi-Module but couldn’t upload the mission because the loss rate was too high.
there are a few problems here, so the first is going to be connectivity. unless you modify some parameters (which i do not recommend) you will not be able to launch the vehicle without connecting to a ground station.
thanks for the suggestion @AWilkins_Ascend.
I have bought the SiK Telemetry Radio and now it is at least moving.
BUT I have another problem now:
The rover is driving to the 1st waypoint and then stops there.
That is not what I want.
The rover should drive a full circle without stopping.