Hi,
My current setup:
HW: PX4FMU 2.4.8 with STM32F427 Rev3
SW: PX4 Firmware v1.8.2
I’m trying to build GitHub - NVIDIA-AI-IOT/redtail: Perception and AI components for autonomous mobile robotics. project, and currently I stack on configuring Companion mode based on this howto: PX4-Devguide/pixhawk_companion.md at master · PX4/PX4-Devguide · GitHub
My problem is following: I cant find MAV_1_CONFIG / MAV_1_MODE / SER_TEL2_BAUD parameters in the QGC
I can only see the following MAV_* parameters:
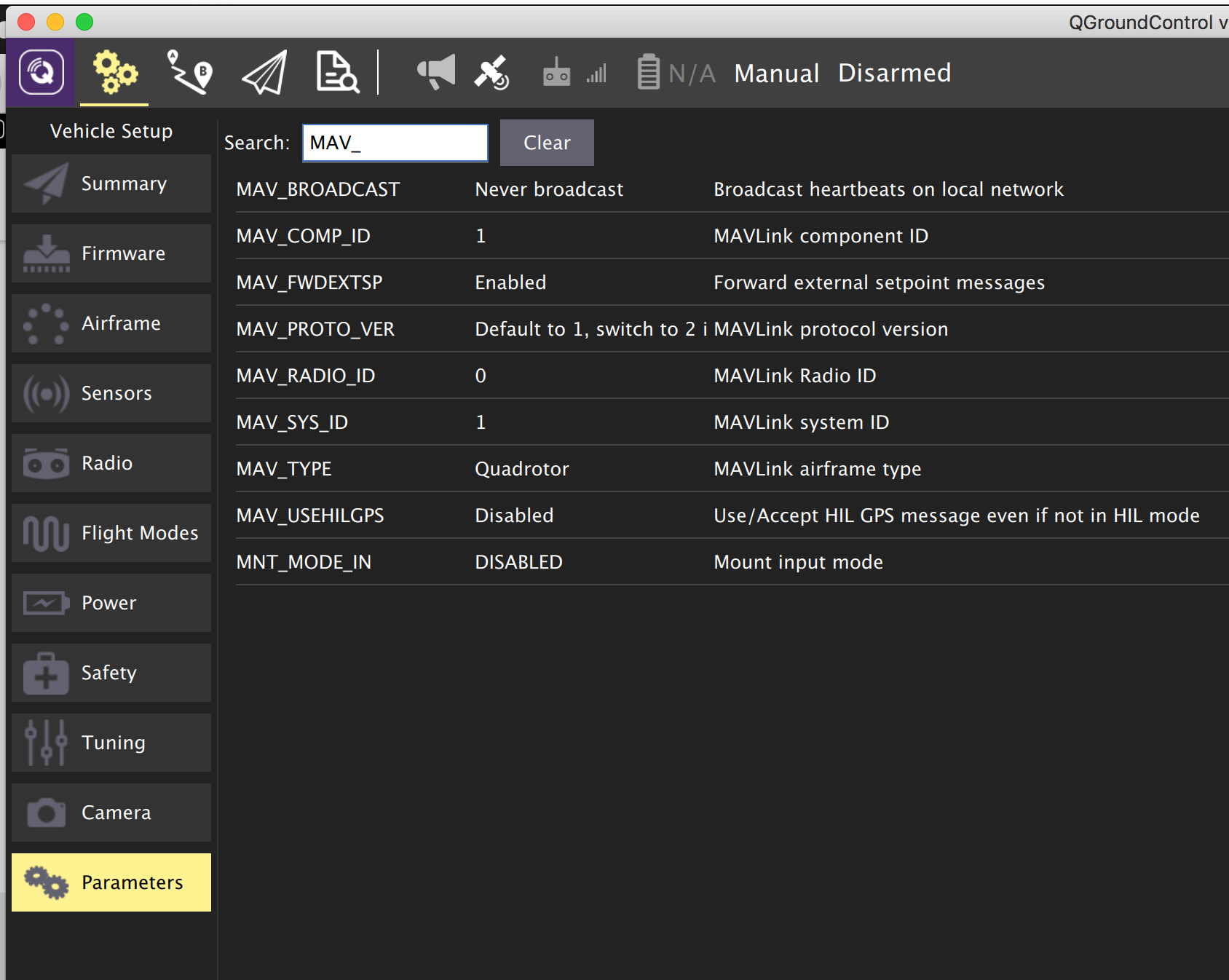
Troubleshooting steps:
- flashed the latest Firmware (v1.8.2) from QGC, no success
- compiled px4fmu-v2_default (based on tag v1.8.2) and flashed with no success
- compiled px4fmu-v3_default (based on tag v1.8.2) and flashed (with option --force since I have Rev 3) with no success
Question: please help me to understand what I’m missing in my configuration to make sure I can switch MAVLink to TELEM 2 port