@RicardoM17 Thank you very much for your help!
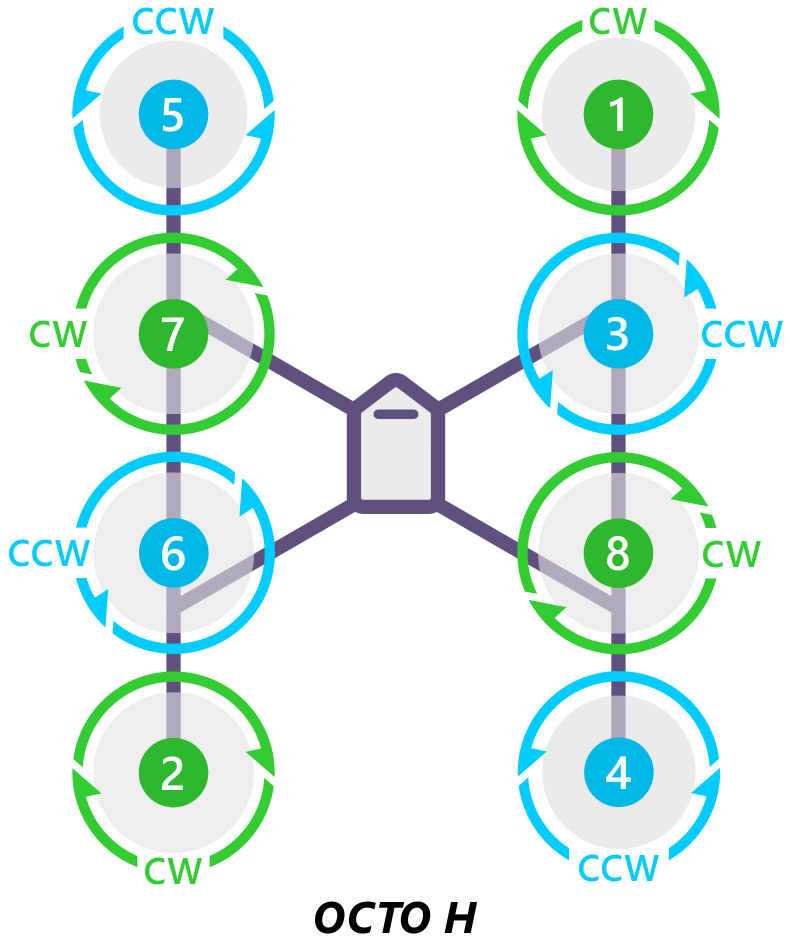
I have made the new octo-H geometry like this
[info]
key = “8H”
description = “Generic Octacopter in H configuration”
[rotor_default]
axis = [0.0, 0.0, -1.0]
Ct = 1.0
Cm = 0.05
[[rotors]]
name = “front_right”
position = [1.08, 0.543, 0.0]
direction = “CW”
[[rotors]]
name = “rear_left”
position = [-1.08, -0.543, 0.0]
direction = “CW”
[[rotors]]
name = “mid_front_right”
position = [0.36, 0.543, 0.0]
direction = “CCW”
[[rotors]]
name = “rear_right”
position = [-1.08, 0.543, 0.0]
direction = “CCW”
[[rotors]]
name = “front_left”
position = [1.08, -0.543, 0.0]
direction = “CCW”
[[rotors]]
name = “mid_rear_left”
position = [-0.36, -0.543, 0.0]
direction = “CCW”
[[rotors]]
name = “mid_front_left”
position = [0.36, -0.543, 0.0]
direction = “CW”
[[rotors]]
name = “mid_rear_right”
position = [-0.36, 0.543, 0.0]
direction = “CW”
The only confusing part was that I had to invert the y position of the rotors in this file order to match the rotor geometry in the sdf file.
I wrote
R: 8H
in the mixer file and
. ${R}etc/init.d/rc.mc_defaults
set MAV_TYPE 14
set MIXER octo_H
in the configuration file.
I added the file names of configuration, mixer, and mixer geometry (the one you told me) to the CMakeLists.txt, but I still got the following error:
ERROR [mixer_module] mixer load failed with -1
ERROR [mixer] failed to load mixers from etc/mixers/octo_H.main.mix
ERROR [mixer] failed to load mixer
ERROR [init] Failed loading mixer: etc/mixers/octo_H.main.mix
Is there something more to do in order to use the “8H” key?