Hi guys.
I have just finished assembling a new Quad intended for indoor flight using the Lumenier Danaus and the 3DR Pixhawk Mini. The build materials are listed below and pictures can be found in the end of the post.
- Lumenier Danaus (250-sized with built in prop-guards)
- AFRO ESC 20A (with SimonK firmware)
- EMAX MT2204 2300kv motors
- Gemfan 5x3 Carbon Fiber Propellers
- ORANGERX R616XN Receiver
- ZIPPY COMPACT 2200MAH 3S 25C LIPO
The PX4 firmware has been updated to the latest commit from the master branch on git and build with px4fmu-v3_default. After updating all sensors has been recalibrated successfully.
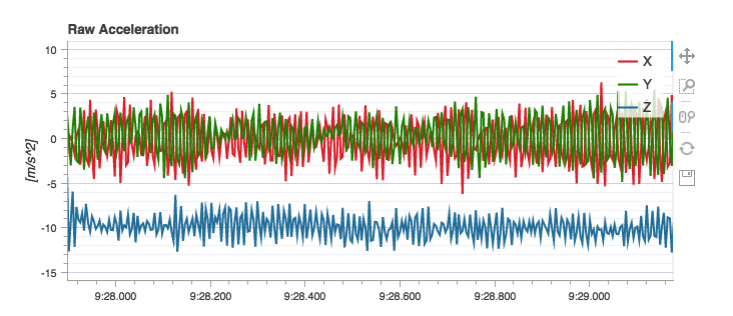
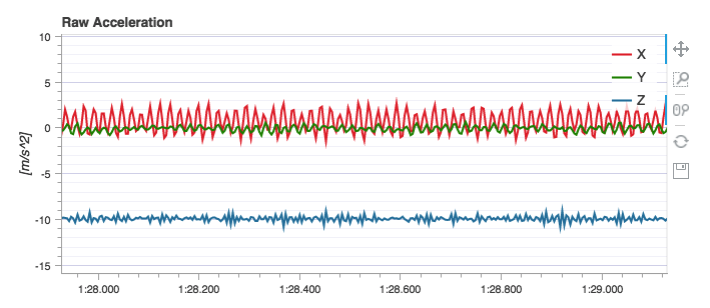
However when taking off the frame sounds like it is vibrating a lot and by looking at the Ulog this is also clear from the Accelerometer z-axis measurements.

The full log can be seen here: Flight Review
Another longer flight with slight joystick movement can be seen here: Flight Review
I have used the foam that came with the Pixhawk but no other vibration dampeners has been used.
A video in where the vibrations can hopefully be heard can be seen here: Lumenier Danaus vibration sound - YouTube
Please notice how the vibrational sound seems to change slightly now and then (some higher pitch notes), which might indicate some of the part resonating. Any clue and suggestions?
Questions
-
Are there anything in special to consider with this Danaus frame or when using Carbon fiber props? Or on the other hand, is the vibration amount as seen by the logs actually too much to achieve good flight or could it safely be ignored?
-
Why does the hardware say PX4FMU_V2 when I am using the Pixhawk Mini (should be V3). Or am I incorrectly mislead by Building the Code · PX4 Developer Guide ?
-
The barometer seem to show a completely incorrect height (120 m)? Why can that be so?
-
I tried to change to the LPE estimator instead of the EKF2 to see if that yielded better results. However with the LPE the drone seemed to drift on the roll and pitch axis as it felt like I constantly had to increase the roll and pitch joystick input. This is also noticable from the flight log: Flight Review
-
In the first log the yaw stick was only touched to move the quadcopter back in place as the yaw angle seemed to keep drifting. Why would the yaw angle drift when the magnetometer is calibrated? Flight mode was set to “stabilized”.
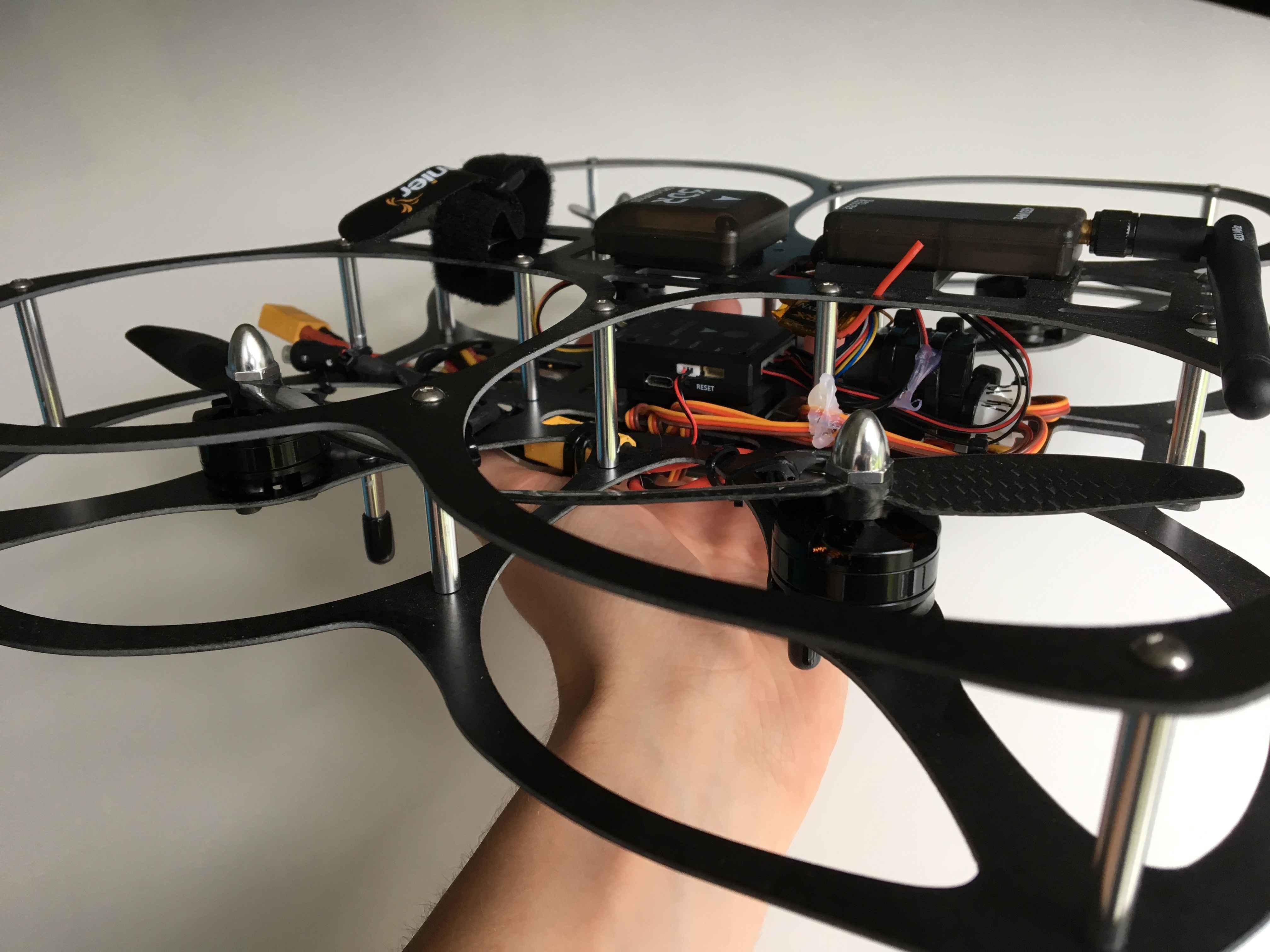
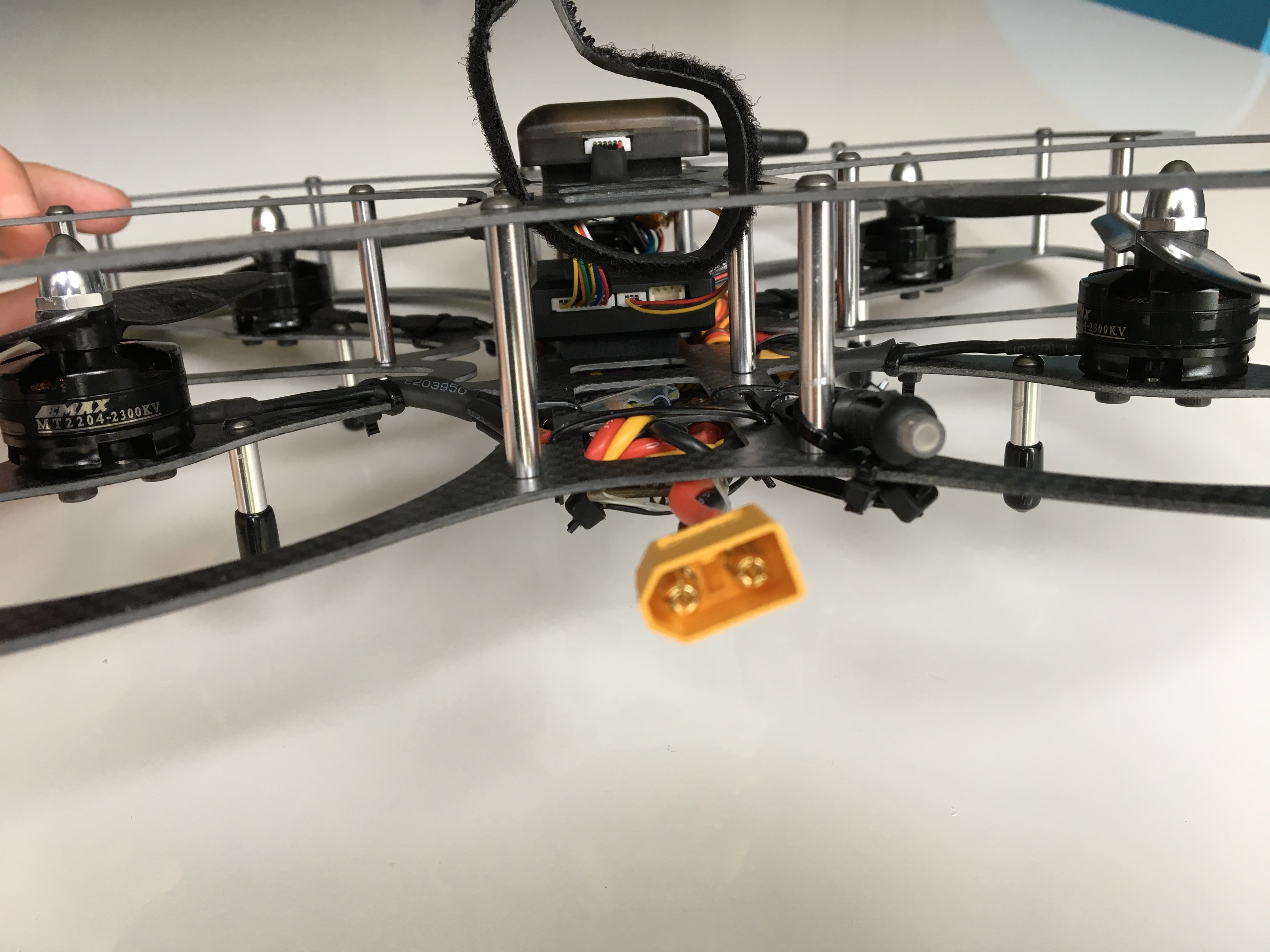
Build pictures


I am looking forward to your comments and possible suggestions
Best regards
Thomas Jespersen