Hello, everyone.
I am doing research about quadcopter position control based on GPS coordinates.
I am using pixhawk4 mini for flight control.
I have a landing target in a distance from the quadcopter and it subscribes the target’s GPS coordinates(latitude, longitude).
I am trying to move the drone to the landing target by GPS coordinates information.
I created
sp_glob_pub = rospy.Publisher(‘mavros/setpoint_raw/global’, GlobalPositionTarget, queue_size=1)
and then later, I publish it.
sp_glob_pub.publish(cnt.sp_glob)
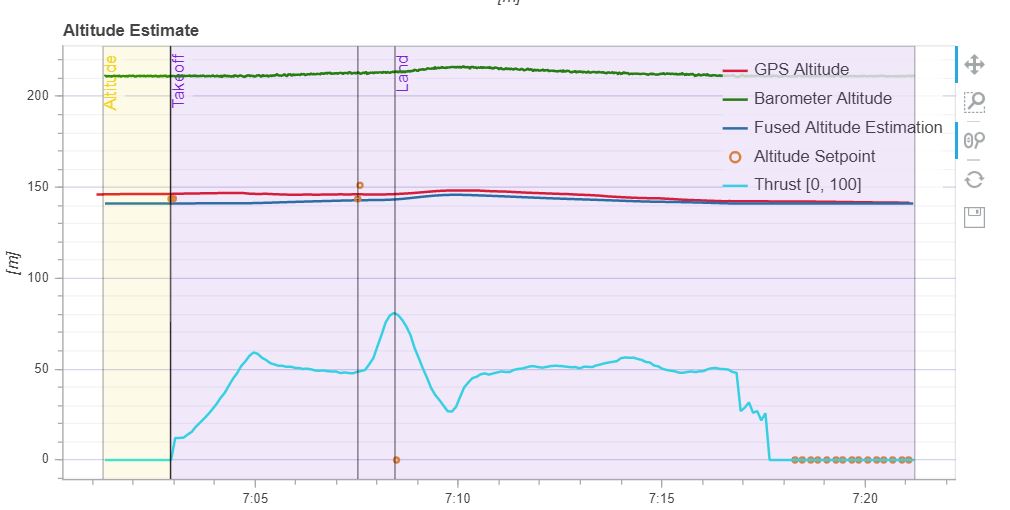
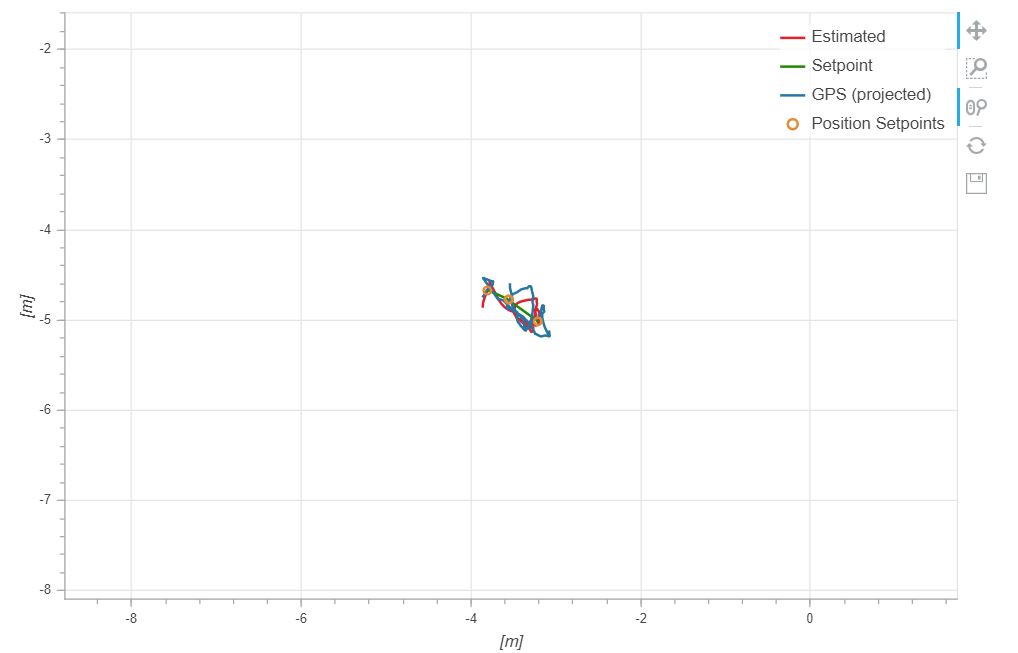
However, when the code runs, the drone does NOT move to the target but it skyrockets(goes high up).
We also tried
sp_pub = rospy.Publisher(‘mavros/setpoint_raw/local’, PositionTarget, queue_size=1)
sp_pub.publish(cnt.sp)
We still have the drone going up.
I think there might be some errors that we are missing in the whole code. Can anyone give some insights for this?
Followings are the full code.
#!/usr/bin/env python
import rospyfrom geometry_msgs.msg import Point, PoseStamped # /opt/ros/melodic/share/geometry_msgs
from mavros_msgs.msg import *
from mavros_msgs.srv import *
from sensor_msgs.msg import NavSatFixfrom targetDetection_topic.msg import TargetPosition
from GPS_topic.msg import Target_GPS
class Controller:
def init(self):
self.sp = PositionTarget()self.sp.type_mask = int('010111111000', 2) # set the flag to use position setpoints and yaw angle self.sp.coordinate_frame = 1 # FRAME_LOCAL_NED self.sp_glob = GlobalPositionTarget() self.sp_glob.type_mask = int('111111111000', 2) self.sp_glob.coordinate_frame = 6 # FRAME_GLOBAL_INT self.sp_glob.latitude = 0 self.sp_glob.longitude = 0 self.sp_glob.altitude = 0 self.target_gps = Target_GPS() self.local_pos = Point(0.0, 0.0, 0.0) self.global_pos = Point(0.0, 0.0, 0.0) self.sp.position.x = 0.0 # geometry_msgs/Point position self.sp.position.y = 0.0 def posCb(self, msg): # rospy.Subscriber('mavros/local_position/pose', PoseStamped, cnt.posCb) self.local_pos.x = msg.pose.position.x # PoseStamped(msg).Pose(pose).Point(position).x self.local_pos.y = msg.pose.position.y self.local_pos.z = msg.pose.position.z print('posCb called') def posCb_glob(self, msg_glob): # rospy.Subscriber('mavros/global_position/global', NavSatFix, cnt.posCb_glob) self.global_pos.x = msg_glob.latitude # NavSatFix(msg_glob).latitude -> global_pos.x = latitude self.global_pos.y = msg_glob.longitude self.global_pos.z = msg_glob.altitude print('posCb_glob called') def GPS_callback(self, msg): self.target_gps.latitude = msg.latitude self.target_gps.longitude = msg.longitude print('GPS_callback called') print(self.target_gps) ## Update setpoint message def updateSp(self): self.sp.position.x = self.local_pos.x self.sp.position.y = self.local_pos.y def updateSp_glob(self): self.sp_glob.latitude = self.target_gps.latitude self.sp_glob.longitude = self.target_gps.longitude self.sp_glob.altitude = 0 print('updateSp_glob called') def x_dir(self): self.sp.position.x = self.local_pos.x + 1 self.sp.position.y = self.local_pos.y def y_dir(self): self.sp.position.x = self.local_pos.x self.sp.position.y = self.local_pos.y + 1class fcuModes:
def init(self):
passdef setArm(self): rospy.wait_for_service('mavros/cmd/arming') try: armService = rospy.ServiceProxy('mavros/cmd/arming', mavros_msgs.srv.CommandBool) armService(True) print('Arming Succeeded') except rospy.ServiceException, e: print "Service arming call failed: %s" % e def setOffboardMode(self): rospy.wait_for_service('mavros/set_mode') try: flightModeService = rospy.ServiceProxy('mavros/set_mode', mavros_msgs.srv.SetMode) flightModeService(custom_mode='OFFBOARD') print('Changed to OffboardMode') except rospy.ServiceException, e: print "service set_mode call failed: %s. Offboard Mode could not be set." % e def setTakeoff(self, global_pos): rospy.wait_for_service('mavros/cmd/takeoff') try: takeoffService = rospy.ServiceProxy('mavros/cmd/takeoff', mavros_msgs.srv.CommandTOL) takeoffService(latitude=global_pos.x, longitude=global_pos.y, altitude=1) print('TakeOff Succeeded') except rospy.ServiceException, e: print "Service takeoff call failed: %s" % e def setAutoLandMode(self): rospy.wait_for_service('mavros/set_mode') try: flightModeService = rospy.ServiceProxy('mavros/set_mode', mavros_msgs.srv.SetMode) flightModeService(custom_mode='AUTO.LAND') print('Auto Landing..') except rospy.ServiceException, e: print "service set_mode call failed: %s. Autoland Mode could not be set." % e def setDisarm(self): rospy.wait_for_service('mavros/cmd/arming') try: armService = rospy.ServiceProxy('mavros/cmd/arming', mavros_msgs.srv.CommandBool) armService(False) print('Disarming Succeeded') except rospy.ServiceException, e: print "Service disarming call failed: %s" % eMain function
def main():
# initiate node
rospy.init_node(‘SNU_drone’, anonymous=True)# controller object cnt = Controller() # flight mode object modes = fcuModes() # ROS loop rate rate = rospy.Rate(20.0) # Subscribe to drone's local position rospy.Subscriber('mavros/local_position/pose', PoseStamped, cnt.posCb) # cnt.local_pos = Drone's local_position rospy.sleep(0.2) rospy.Subscriber('mavros/global_position/global', NavSatFix, cnt.posCb_glob) # cnt.global_pos = Drone's GPS position(lat, long, alt) rospy.sleep(0.2) rospy.Subscriber('/Target_GPS_msg', Target_GPS, cnt.GPS_callback) rospy.sleep(0.2) # Setpoint publisher sp_pub = rospy.Publisher('mavros/setpoint_raw/local', PositionTarget, queue_size=1) rospy.sleep(0.2) sp_glob_pub = rospy.Publisher('mavros/setpoint_raw/global', GlobalPositionTarget, queue_size=1) rospy.sleep(0.2) ########################################## #### Now the Drone starts operation!! #### ########################################## # # Arm the drone modes.setArm() rospy.sleep(1) # # We need to send few setpoint messages, then activate OFFBOARD mode, to take effect k = 0 while k < 10: sp_pub.publish(cnt.sp) rate.sleep() k = k + 1 # activate OFFBOARD mode modes.setOffboardMode() # # TakeOff modes.setTakeoff(cnt.global_pos) rospy.sleep(3) # # Update sp_glob to Target's GPS cnt.updateSp_glob() rospy.sleep(1) # # # # Update sp to Target's local position cnt.updateSp() rospy.sleep(1) cnt.x_dir() rospy.sleep(0.2) # # # Move the drone to Target's GPS position sp_glob_pub.publish(cnt.sp_glob) rospy.sleep(5) # # Move the drone to Target's local position by Camera info sp_pub.publish(cnt.sp) rospy.sleep(3) # Land the drone modes.setAutoLandMode() rospy.sleep(3) # Disarm the drone modes.setDisarm() rospy.sleep(2)if name == ‘main’:
try:
main()
except rospy.ROSInterruptException:
pass