Hi everyone,
We’re testing a VTOL tailsitter. Naturally it has TERRIBLE yaw control.
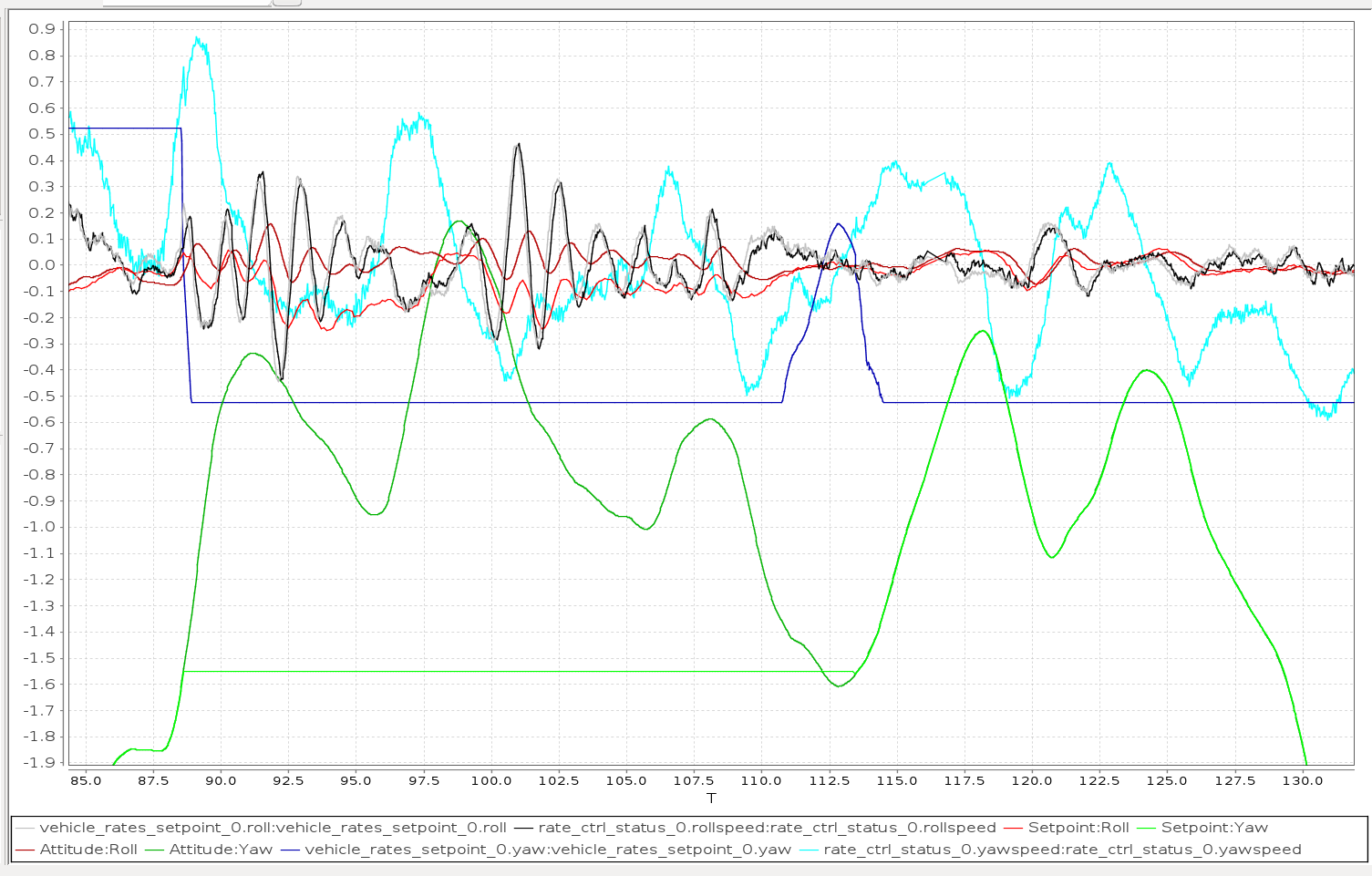
We’ve been facing an issue where the roll control gets really bad when the yaw error is high (which is often). We’re running a Pixhawk 4 with some minor modifications to PX4 v1.9.0.
What’s weird is there is actually a part in the code here to take care of this, so why isn’t it working? Does anyone have any insight into this @bkueng?
Here is a screenshot and I’ve upladed sample log here where we disabled the ailerons to highlight the problem.
Thanks in advance!
Patrick