Could someone please take a look at this log, and maybe explain why the drone flips 360.
https://logs.px4.io/plot_app?log=46ebc350-9cb9-4eee-9892-a2f54c2aa4ed
Thank you.
Could someone please take a look at this log, and maybe explain why the drone flips 360.
https://logs.px4.io/plot_app?log=46ebc350-9cb9-4eee-9892-a2f54c2aa4ed
Thank you.
Is the drone airborne or on the ground when flips?
Why the kill-switch engaged in less than 1s after the drone start to flip?
The drone is in the air when it flips. And flew just fine for a about a minute before the flip.
I tried to regain control, but couldn’t, and then flipped the kill switch.
By the way, the 3D render is pretty accurate.
Based on the roll angle graph and how the estimated angle diverges rapidly from the set point, I would guess that a motor or pair of motors stopped functioning (lost power or signal line?).
For a lost motor, I would have expected the actuator output of the failed motor to have maxed out immediately to counteract the drop just before the tumble started. However, I don’t really see that output ramp in the actuator outputs.
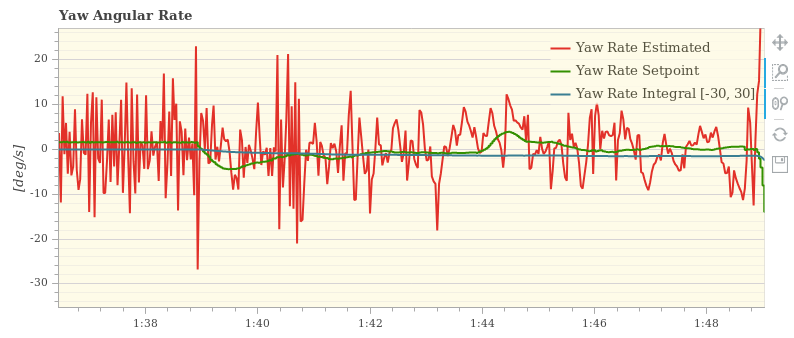
Hi @mathias-h, as I mentioned in the Github issue, the reason I think your motor orientations might have an issue is because of your yaw rate tracking:
I have flown a quad briefly on 2 occasions where the motors were spinning the wrong directions but still paired such that the quad was mostly stable in pitch and roll but not in yaw. In this case, under nominal conditions things work for a short period, (until the system goes unstable). If this is the case the quad also sounds terrible during flight, you will hear the yaw incongruity from the motors/props.
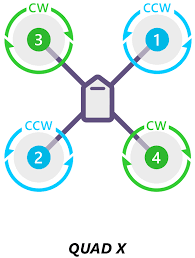
Check once more that your motors are spinning the way this picture looks and let us know if this is not the case. Otherwise, it might have simply been unstable yaw rate gains that drove the other axes unstable; I can’t really spot much else in your logs that gives any more clues.