Hi all,
Lately I upgraded my px4 with a holybro telemetry system.
I was used to change flight modes using switches on the RC controller, and works fine ofc.
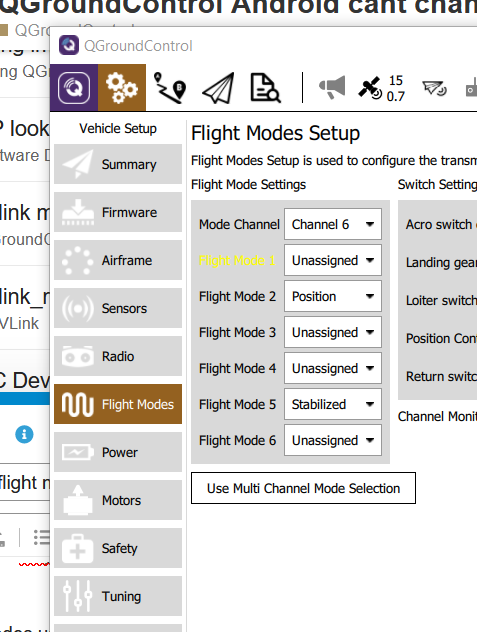
When connected to USB, i set up the flight modes using channel 6, flight mode 2 and 5, controlled by RC switch.
But when I connect to telemetry instead of USB, the exact same RC switch now controls flight mode 1, 4, 6 (see picture attached). So it seems that setting up flight modes on PX4 with usb or telemetry system is different: it assigns flight modes differently to the RC switch.
Does anyone know how to fix this issue?