Dear all
Is the any step-by-step manual how to connect popular STORM32 based gimbal to qground control and allow user to control this gimbal manul using mavlink connection only?
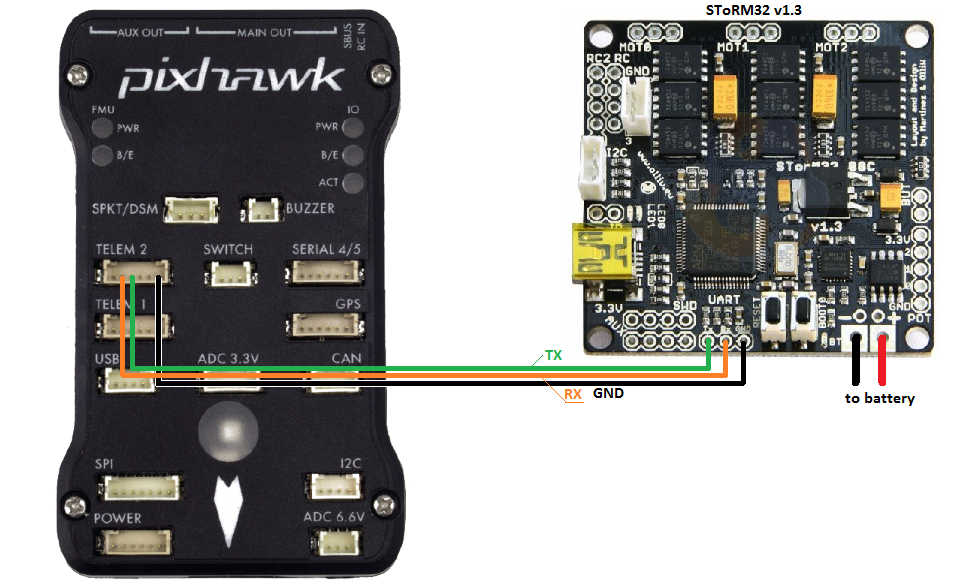
My connection looks currently as follow:
http://ardupilot.org/copter/_images/pixhawk_SToRM32_connections.jpg
{kind=link}
What are the next steps for PX4 firmware users ? Can I do manul control over this connection or should I add something else or migrate to ardupilot firmware with mission planner and continue with steps presented on mission planner pages:
http://ardupilot.org/copter/docs/common-storm32-gimbal.html