Hi there
I want to use px4flow to implement loiter mode instead of using GPS module.
I followed steps in this site: https://ardupilot.org/copter/docs/common-px4flow-overview.html?highlight=px4flow
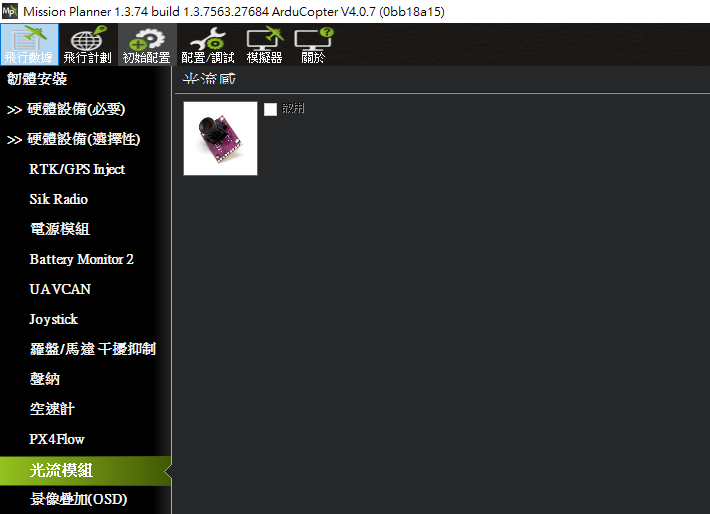
However I cannot click enable button in Mission Planner
Initial Setup | Optional Hardware | Optical Flow|Enable
I have tried to set flow_type = 1 in parameter tree,and connect px4flow to px4mini through i2c,
but values about flow is still zero(opt_m_x,opt_m_y…)
Also,I’ve tried connecting px4flow module through usb to computer,and I can see the value changes in mission planner.I just cannot use px4flow when I connect it with px4mini.
How can I solve this problem?