Hi Everyone,
I’ve just installed the simulation environment for Ubuntu 22.04 and Gazebo Garden–instructed here Ubuntu Development Environment | PX4 Guide (main).
- Downloaded PX4 Source Code:
git clone https://github.com/PX4/PX4-Autopilot.git --recursive - Run ubuntu.sh:
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
My environment variables are sourced as follows:
export GZ_VERSION=garden
export GZ_SIM_RESOURCE_PATH=$PX4_GZ_MODELS:$PX4_GZ_WORLDS
export PX4_GZ_WORLDS=/home/user/PX4-Autopilot/Tools/simulation/gz/worlds
export PX4_GZ_MODELS=~/PX4-Autopilot/Tools/simulation/gz/models
(Ive tried changing PX4_GZ_MODELS to PX4_SIM_MODEL since GZ_MODELS is deprecated, if i’m not mistaken. I’ve also tried to make clean and run the simulation again)
However, when I run the simulation make px4_sitl gz_px4vision this is the error that I get:
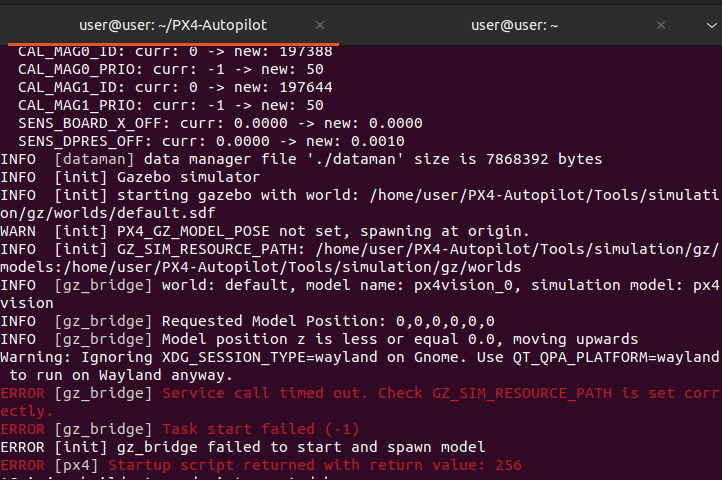
All of the worlds available in the repo can be loaded (i.e. make px4_sitl gz_x500 etc), but none of the models are being spawned. Am I missing something in setting up the simulation environment, or is there an issue with GZBridge.cpp?
Thanks in advance for your help.