In the guide there is a spot which says:
If you have an Apple M1, M2 etc.....
Select Terminal.app and right-click on it, then choose Duplicate.
Rename the duplicated Terminal app, e.g. to x86 Terminal
Now select the renamed x86 Terminal app and right-click and choose *Get Info
...
This has functionality is no longer available and as such I created an alias intel and brew-intel in my .zshenv file:
alias intel='env /usr/bin/arch -x86_64 /bin/zsh --login -c "source ~/.zshrc-intel; exec zsh -l"'
alias brew_intel="/usr/local/bin/brew"
I’ve also created a separate python env that is created in this shell so that all x86 components are leveraged.
I have not gotten a successful build, although I have successfully created the toolchain, cloned the repo, etc. A lot of the issues look like bad compiled headers from C++ libs. I am reaching out to see if anyone has successfully created an env on Mac OSX15 with m series chip.
Thanks!
Mac Specs
Apple M3 Pro
36 GB
Sequoia 15.5
Nov 2023
A work around that I can live with is through using docker to ensure the environment sets up nicely. I had to use the older Gazebo and VCN to view the GUI.
First, I used docker to pull in the px4 dev simulation (note this terminal becomes the PX4 repl):
docker pull px4io/px4-dev-simulation-focal
Then ran the bash script below:
docker run -it --platform linux/amd64 \
-p 5900:5900 \
-p 18570:18570/udp \
-p 14550:14550/udp \
-v /Users/YOUR_USER/PX4-Autopilot:/src/PX4-Autopilot \
-w /src/PX4-Autopilot \
--shm-size=1gb \
px4io/px4-dev-simulation-focal bash -c "
# Install VNC components
apt-get update && apt-get install -y x11vnc xvfb openbox mesa-utils
# Start virtual display
export DISPLAY=:1
Xvfb :1 -screen 0 1280x1024x24 &
sleep 3
# Start window manager
openbox &
sleep 2
# Start VNC server
x11vnc -display :1 -nopw -listen 0.0.0.0 -xkb -rfbport 5900 -forever -shared &
sleep 5
# Set up environment
export LIBGL_ALWAYS_SOFTWARE=1
export PX4_SIM_HOST_ADDR=0.0.0.0
echo 'VNC server running on port 5900'
echo 'Connect with VNC viewer to localhost:5900'
echo 'MAVLink available on UDP port 14550'
# Build and run PX4
make clean
make px4_sitl_default gazebo-classic_iris
"
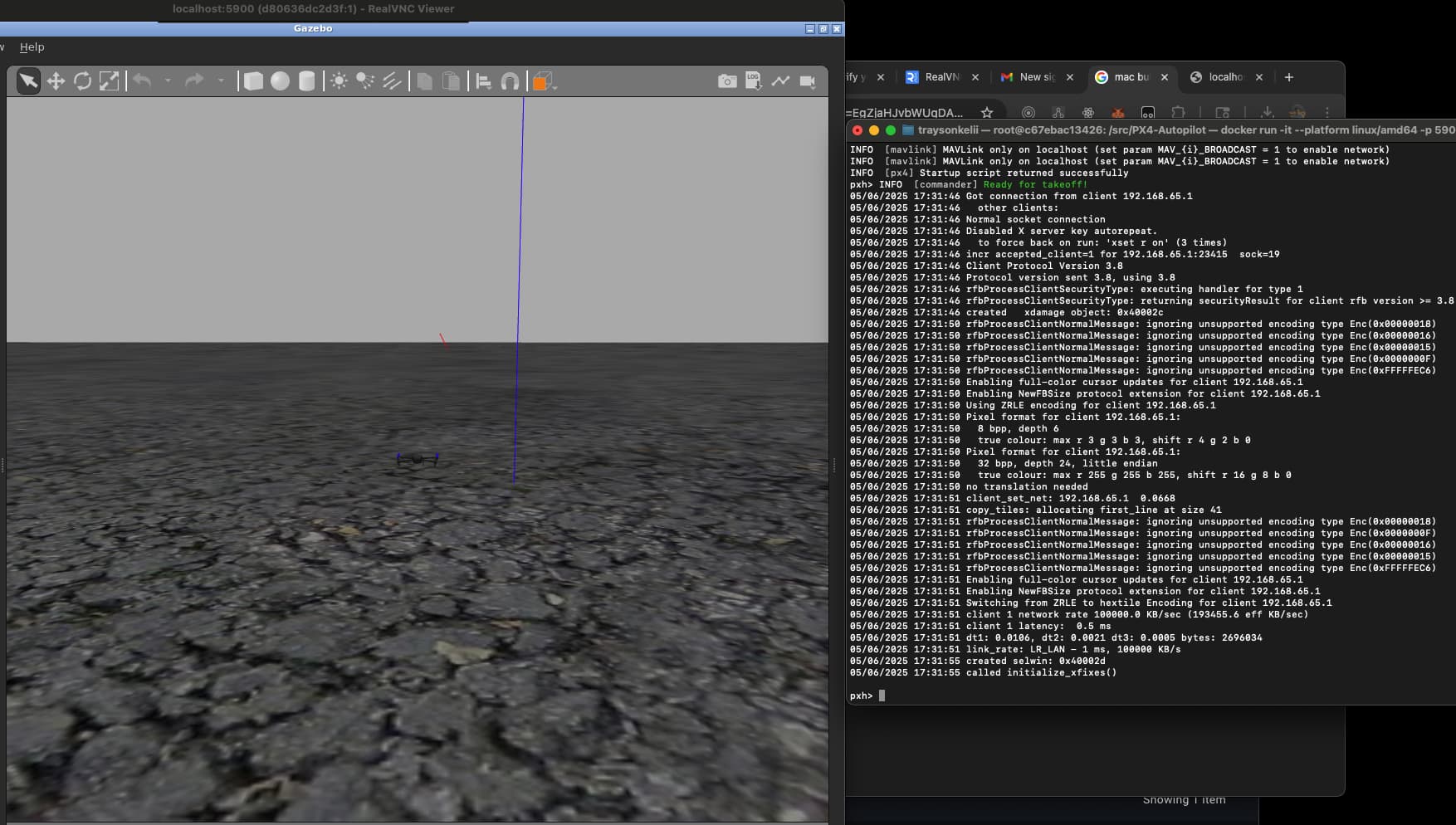
Then opening up a VNC Viewer I was able to view the drone.
I am still fighting with
qgroundcontrol to communicate with the docker container, but I might just throw it in docker if it doesn’t work.