Hi all!
I took my self built drone for a flight yesterday and took of in position mode. All started well and I initially tested all the controls when all of a sudden the drone just shot up into the air. My guess was that the GPS altitude estimation was just extremely unreliable. The drone also did not really respond to my inputs anymore.
Ultimately the drone crashed, which can be seen at the end when the position is just drifting away.
Link to flightlog below:
Sorry about the crash. It does look like your drone has high vibrations which makes for poor altitude estimation:
It generally should still respond to your controls though.
For first flights, I generally suggest to have Stabilized mode ready on the controller to bring it down safely in case this happens.
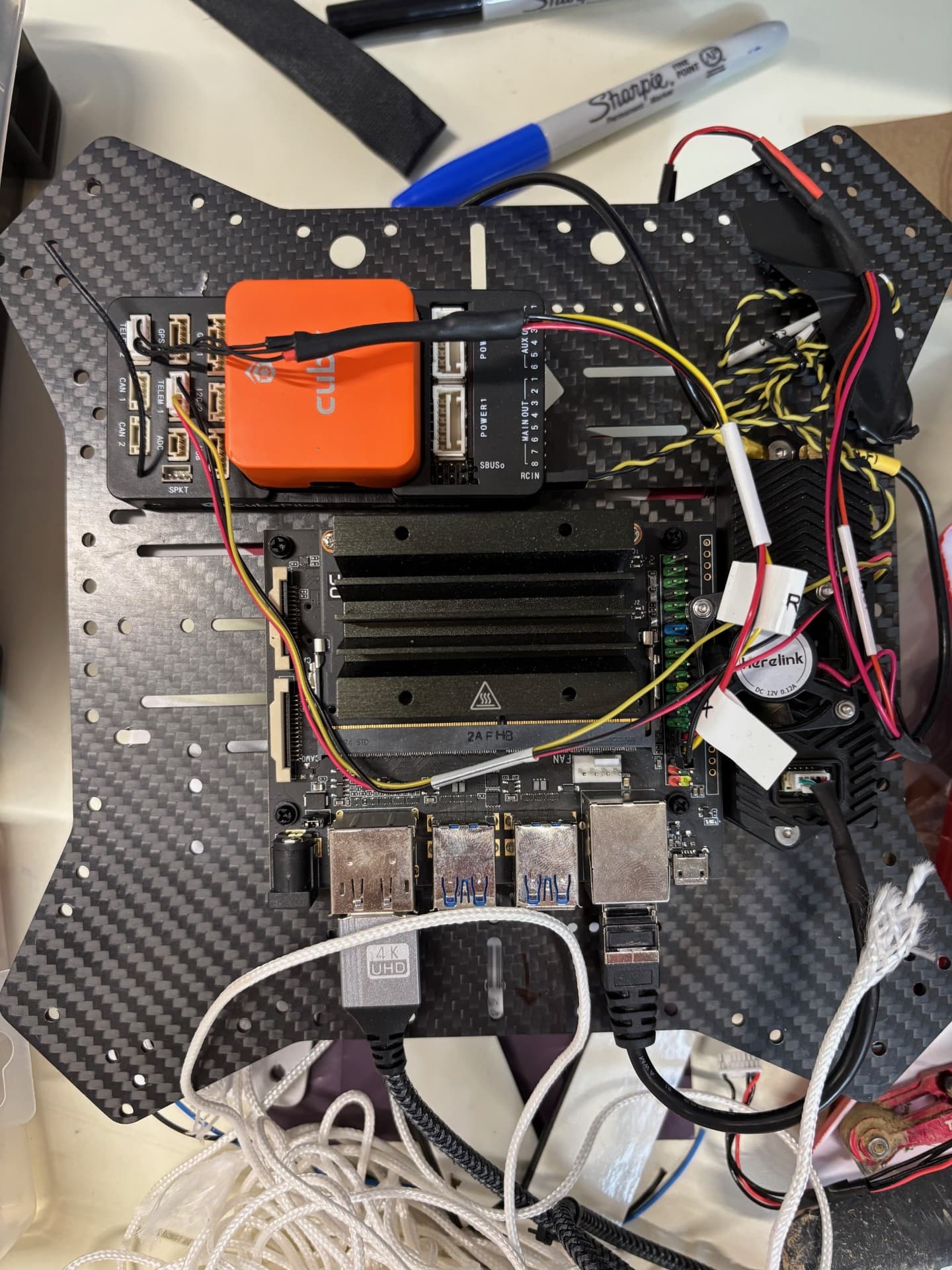
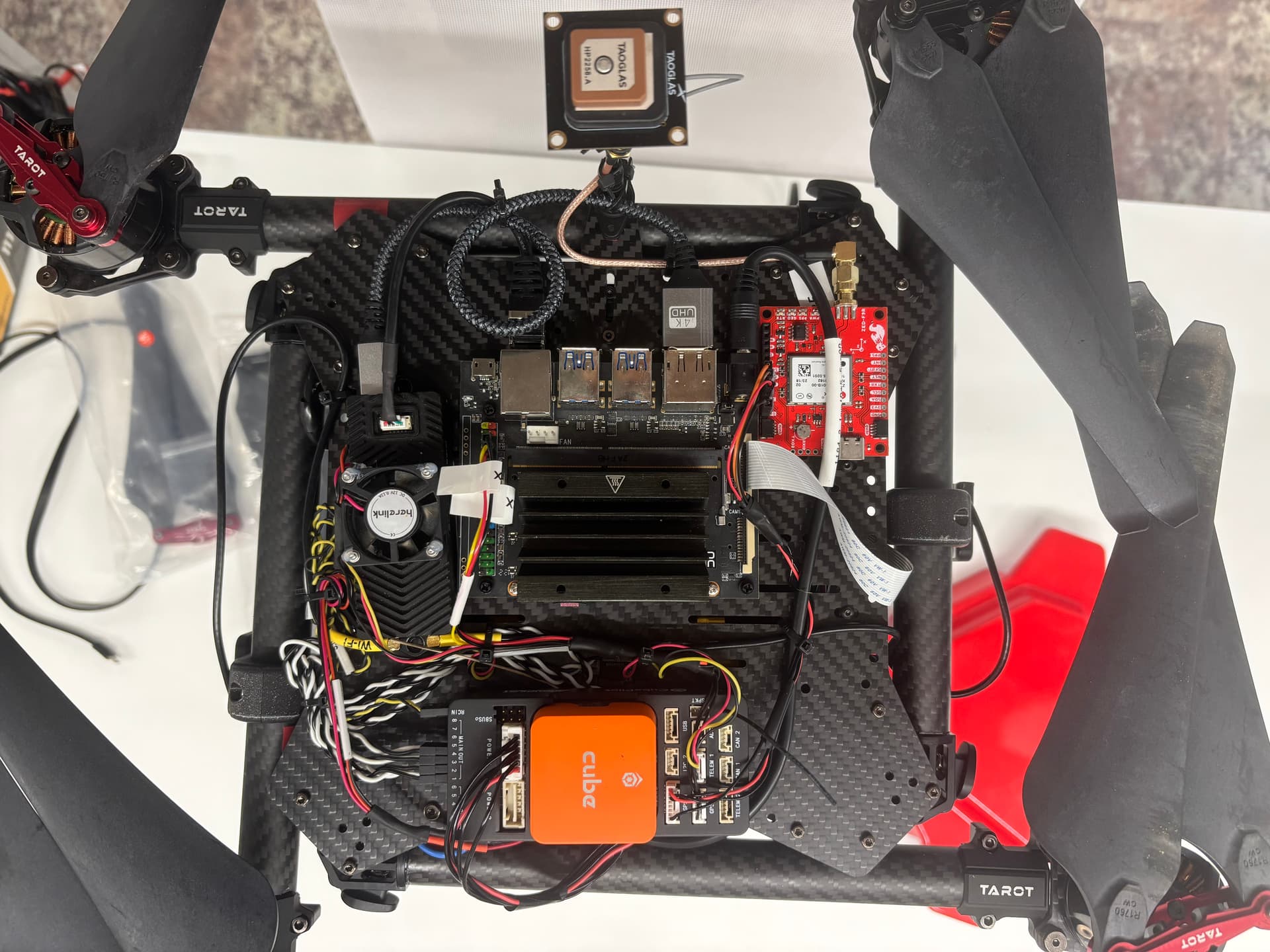
I wonder why the vibrations are so high, any chance you can share a few pictures of the drone, and also how the CubeOrange is mounted/placed?
Hi Julian,
Thank you for your input! I indeed mounted the flight controller quite poorly and also did not secure all the cables properly enough to prevent vibrations. I have also changed the controller setup now so that I can easily switch to stabilized mode if things go wrong.
This is roughly how it was originally mounted.
I now used double sided foam pads to mount all electronic components and zip tied all cables. I hope this will resolve the issues. I also plan to do the next flight in stabilized mode like you recommended! And will keep an eye on the GPS readings while doing so.
How is the Cube fixed to the carbon plate? I suggest to use double sided tape usually.
The setup looks overall pretty clean. One note is that it might be worthwhile to set the IMU offset from center using these params: EKF2_IMU_POS_X, etc.